智能网联即将量产,高精度地图能发挥什么作用?
智车科技IV本文来源:智车科技
/ 导读 /
智能网联已到了量产前夜,新兴行业不再是之前单纯的汽车、单纯的交通,也不是单纯的运营商。模式也在不断演进,虽然这个行业还没有完全成熟,但如果没能尽早融入,成熟之日可能蛋糕早就分完了。
相对以往的导航地图,高精地图是智能网联交通的共性基础技术,其服务对象并非只是人类驾驶员,也包括智能网联/自动驾驶汽车。我们来看看几家做图的公司在干什么。

智能网联趋势向上,问题有待解决
十四五规划中整整用了一个章节来定义中国数字建设框架,明确提出智能汽车、新能源汽车、物联网、智能交通具体的工作目标,给整个行业做了非常详实的定义。
今年2月,国家印发《国家综合立体交通网规划纲要》,要求各地区各部门结合实际认真贯彻落实。规划纲要提出了智慧交通发展的一个非常关键的指标,2035年前,希望用15年左右时间将所有基础设施的90%数字化和网联化,这是一个非常巨大的市场空间,值得重点关注。
近几年,国内智能网联行业发展风生水起,呈现出四个特点:
·第一,政策引领非常积极,各地政府不断出台相关法律法规,3月,《深圳经济特区智能网联汽车管理条例》公开征求意见,拟规定“无人驾驶”等智能网联汽车登记上牌后,可以和传统汽车一样上路行驶。
·第二,近年来落地项目规模逐渐变大,从之前的4000、5000万元的示范项目,到现在40亿、50亿,甚至投入百亿。地方政府已经看到自动驾驶落地将给经济带来帮助。
·第三,从目前情况看,装备智能网联终端的汽车可能在短期内急剧爆发。《智能汽车发展战略纲要》中提到,2025年新生产的汽车要50%网联化,有可能在2022、2023年就能达到100%。
·第四,现在的标准解决了第一步问题,不同厂家、供应商、主机厂有了共同语言,但是还没有打通公安、国土、交通、电信等行业的标准框架,各大部委正在努力推动。
四维图新车路协同研究院副院长郭磐石指出,要让这个事情稳稳落地,顺利展开,还有一些问题需要解决:
·第一是项目很多,但应用都比较简单,V2I的协作性感知能力只有一些示范,量产的几乎没有。
·第二,主机厂很关注V2X,但不同主机厂互认存在很大问题,量产高级应用场景非常缺乏。
·第三,商业模式尝试了很多,但有点像当年的通信基础设施,刚开始是邮政部门投入建设,发展到一定规模、体量时,再形成共同运营资产,出现运营商,车联网建设可能也会这样,现在顶层模式还在摸索。

智能网联行业地图应用和定位
在智能网联行业,高精度地图能发挥什么作用呢?
·第一是云端。24小时不间断运行的地图与云进行数据交互和更新。这不仅要打通路端与车/主机厂服务器的协同,还要打通新生的路侧协同,包括智能服务和高速公路。
·第二是边缘端。边缘计算是路侧感知不可或缺的重要部分,除了传统感知算法,还需要空间基准、所有感知信息(包括摄象头、激光雷达、毫米波雷达)在统一空间进行标定,还涉及地图拼接融合算法,以确保以同样的语言识别信息,这是一个很难的过程。
·第三是车端。对地图来说,在未来的量产化、规模化过程中,空间基准非常重要,尤其是所有传感器及大量路侧终端、车载终端,以及来自云的信息,都要在统一的地理空间框架下交互和匹配。隧道、地下没有空间感,唯一参照物只有地图。
·第四是地图。地图要兼顾“车-路”系统中的典型应用场景。现在,地图第一次在真正意义上让主机厂和基础设施厂商用一种共同认可的语言进行交互。之前交通部门只做公路,车和路没有任何关系,通过智能网联,它们发生了关系,地图建立起更准确的匹配和关联关系。未来地图会延伸出很多商业模式,比如基于调用的收费体系。

四维图新:地图是一个基础设施
四维图新有一系列自动驾驶与地图规划算法,其判断是:未来地图是一个基础设施,可能不像传感器有巨大的市场空间,但是它很重要。
四维图新一直在与主机厂、互联网创业公司一起推进智能网联,打造AI车路协同整体解决方案——智能汽车大脑。产品布局和方案包括导航、车联网、芯片、大数据。车路协同方面主要有地图、定位、V2X地图服务平台,以及自动驾驶解决方案。

车路协同四大要素
·地图:作为四维图新的强项,整个产品矩阵有四类:常规导航地图、辅助自动驾驶/高级自动驾驶地图、辅助车路协同高精度地图、满足自动驾驶仿真测试应用的仿真场景库,未来有可能发展成为建设数字经济孪生城市的基础数据。
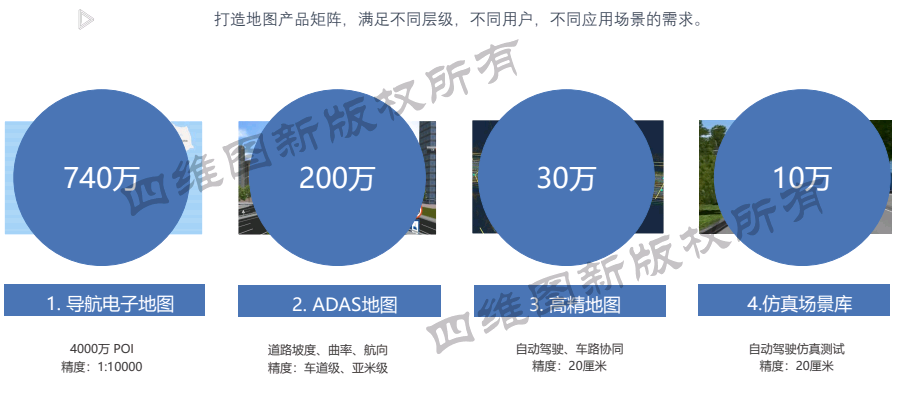
产品矩阵
·高精度定位:四维图新旗下的六分科技专门从事基于卫星导航的定位方案,目前已发布针对于普通手机终端、汽车终端的一些方案,可以提供24小时服务;还有近几年比较火的基于高精度地图的融合解决方案,已经在量产车上落地。四维图新的定位可以兼顾常规情况下基于卫星信号定位,以及卫星信号不足或一些特定场景的应用。

高精度定位方案
·V2X解决方案:包括两个主要部分,一个是路侧动态地图服务平台DMP,主要作用是将所有布设在路侧传感器的通信、计算、分析与地图空间基准融合起来,编译为V2X协议能识别的格式,向车端、云端、路侧分发和推送;同时保证地图平台24小时不间断通信。路侧DMP平台是目前各大实验区、示范区、智慧公路、智慧园区落地的交付产品。
V2X解决方案
另一个是车端应用。现在大部分主机厂没有使用地图来处理前端碰撞等场景,而是感知达到一定距离时,由前车发出一个紧急碰撞信号,让后车紧急刹车。严格讲,如果两车不在一个车道,是不需要做这种动作的。但现在的算法中没有这种判断信息,在拐弯情况下会出现误判。所以,四维图新与一些主机厂和软件厂商合作将地图有关算法、信息加入到整个场景应用中。这最后一公里有可能是决定自动驾驶安全最重要的工作。
1 2 下一页>
