在 C++ 中使用 OpenCV 对图像中的对象进行扭曲透视
磐创AI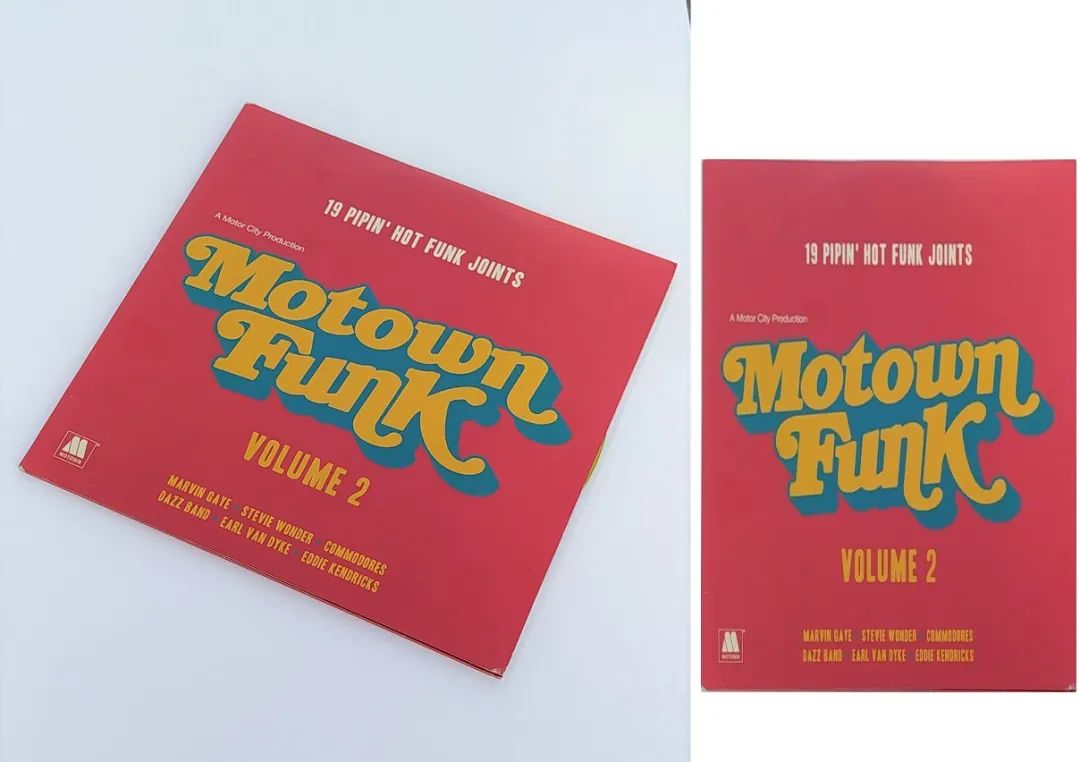
例子。
代码:
#include <opencv2/imgcodecs.hpp>
#include <opencv2/highgui.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/objdetect.hpp>
#include <iostream>
using namespace cv;
using namespace std;
string PATH = "funk.jpg"; //Image Path
int AREA_FILTER = 1000;
Mat imgOrg, imgProc, imgWarp;
vector<Point> initialPoints, docPoints;
int w = 420, h = 596;
Mat preProcessing(Mat img)
{
cvtColor(img, imgProc, COLOR_BGR2GRAY); // to gray scale
GaussianBlur(imgProc, imgProc, Size(3,3), 3, 0); // blurring for better canny performance
Canny(imgProc, imgProc, 25, 75); // edge detection
Mat kernel = getStructuringElement(MORPH_RECT, Size(3, 3));
dilate(imgProc, imgProc, kernel);
return imgProc;
}
vector<Point> getContours(Mat imgDil){
//detects the biggest rectangle in image
vector<vector<Point>> contours; //vectors example: {{Point(20,30),Point(50,60)},{},{}}
vector<Vec4i> hierarchy;
findContours(imgDil,contours,hierarchy,RETR_EXTERNAL,CHAIN_APPROX_SIMPLE); //finding contours
vector<vector<Point>> conPoly(contours.size());
vector<Rect> boundRect(contours.size());
vector<Point> biggest;
int maxArea=0;
for (int i=0;i<contours.size();i++){
int area = contourArea(contours[i]);
string objectType;
if(area>AREA_FILTER){ //filter small rectangles
float peri = arcLength(contours[i],true);
approxPolyDP(contours[i],conPoly[i],0.02*peri,true);
if(area>maxArea && conPoly[i].size()==4){ //find biggest (4 for rectangle)
maxArea = area;
biggest = {conPoly[i][0],conPoly[i][1],conPoly[i][2],conPoly[i][3]};
}
}
}
return biggest;
}
void drawPoints(vector<Point> points, Scalar color){
for(int i=0;i<points.size();i++)
{
circle(imgOrg,points[i], 5,color,FILLED);
putText(imgOrg, to_string(i),points[i],FONT_HERSHEY_PLAIN,4,color,4);
}
}
vector<Point> reorder(vector<Point> points ){
vector<Point> newPoints;
vector<int> sumPoints, subPoints;
//get corners
for(int i = 0;i<4;i++){
sumPoints.push_back(points[i].x + points[i].y);
subPoints.push_back(points[i].x - points[i].y);
}
newPoints.push_back(points[min_element(sumPoints.begin(),sumPoints.end()) - sumPoints.begin()]);
newPoints.push_back(points[max_element(subPoints.begin(),subPoints.end()) - subPoints.begin()]);
newPoints.push_back(points[min_element(subPoints.begin(),subPoints.end()) - subPoints.begin()]);
newPoints.push_back(points[max_element(sumPoints.begin(),sumPoints.end()) - sumPoints.begin()]);
return newPoints;
}
Mat getWarp(Mat img, vector<Point> points, float w, float h)
{
Point2f src[4] = {points[0],points[1],points[2],points[3]};
Point2f dst[4] = {{0.0f,0.0f},{w,0.0f},{0.0f,h},{w,h}};
Mat matrix = getPerspectiveTransform(src,dst);
warpPerspective(img, imgWarp, matrix, Point(w, h));
return imgWarp;
}
void main() {
//sample
imgOrg = imread(PATH);
resize(imgOrg,imgOrg,Size(),0.5,0.5); // reduce the size of the photo in half
//preprocessing
imgProc = preProcessing(imgOrg);
//get contours
initialPoints = getContours(imgProc);
//drawPoints(initialPoints,Scalar(0,0,255));
docPoints = reorder(initialPoints);
//drawPoints(docPoints,Scalar(0,255,0));
//warp
imgWarp = getWarp(imgOrg, docPoints, w, h);
imshow("Image imgWarp",imgWarp);
waitKey(0);
}
让我们分解代码;
首先我们读取图像文件。然后我们(可选地)减小图像的大小。
string PATH = "funk.jpg"; //Image Path
imgOrg = imread(PATH);
resize(imgOrg,imgOrg,Size(),0.5,0.5);
为了从操作中获得更好的结果,我们首先需要对图像进行一些预处理和转换。我在一个称为预处理的方法中收集了所有这些过程。
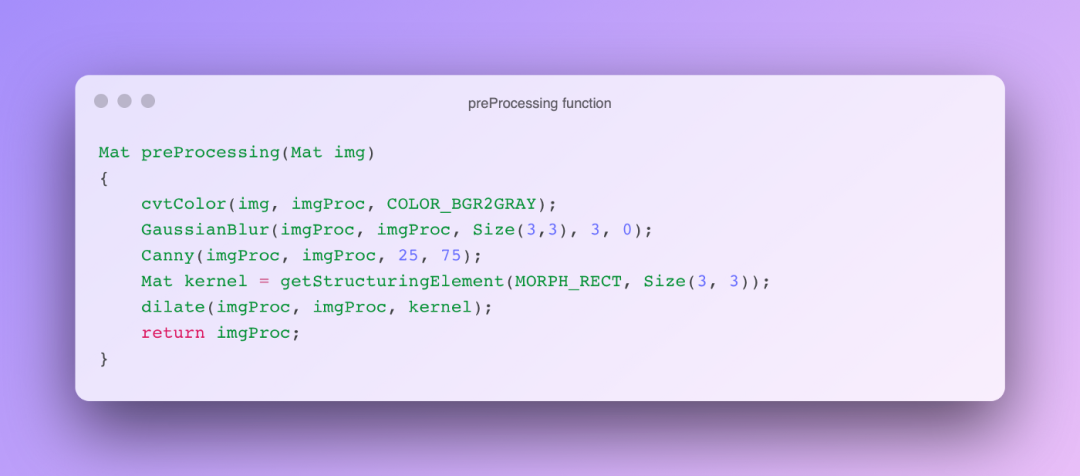
预处理功能
在使用 opencv 时,我们经常将图像转换为灰度。原因是:
· 它减小了尺寸。我们获得了单个通道,而不是 RGB 的三个通道。
· 我们得到更低的复杂性。RGB:10x10x3 像素 = 300 个数据;灰度:我们只有10x10x1 = 100 个输入。
· 许多 Opencv 方法只能在灰度下工作。因此,有必要提前进行转换。
cvtColor(img, imgProc, COLOR_BGR2GRAY);
我们将使用 Canny Edge Detector 来检测角点。它在图像模糊的情况下获得了更好的效果。这个过程称为平滑。边缘检测器内核对噪声非常敏感。因此,始终有必要应用平滑。
Size(3,3):高斯核的大小。
GaussianBlur(imgProc, imgProc, Size(3,3), 3, 0);
Canny 函数从图像中提取边缘。25 和 75 值是保留在该过程中提取的边缘的阈值。
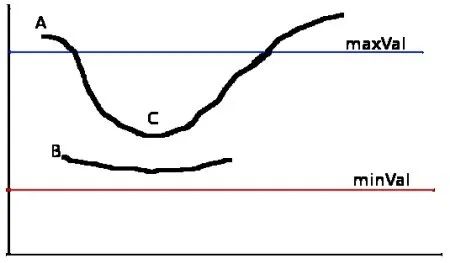
Canny(imgProc, imgProc, 25, 75);
为形态学操作创建一个矩形内核。
Mat kernel = getStructuringElement(MORPH_RECT, Size(3, 3));
我们将使用膨胀作为形态学操作。膨胀增加了对象的面积,它增加了图像中的白色区域。
dilate(imgProc, imgProc, kernel);
现在让我们获取对象的轮廓;
initialPoints = getContours(imgProc);
在getContour方法中,我们检测将扭曲其透视图并提取其轮廓的对象。

获取轮廓
findContours方法将返回我们的轮廓点。我们需要保留所有找到的点吗?
如果我们传递 CHAIN_APPROX_NONE 参数,那么所有的点都会被保留。但是,我们可以通过消除冗余点来获得存储空间。为此,我们也可以传递 CHAIN_APPROX_SIMPLE。
为了获得外部轮廓,我们通过了 RETR_EXTERNAL
findContours(imgDil,contours,hierarchy,RETR_EXTERNAL,CHAIN_APPROX_SIMPLE); //finding contours
然后,在 for 循环中,我们去除噪声并获取对象。
我们计算每个轮廓的面积。面积必须大于过滤常数;
int area = contourArea(contours[i]);
...
if(area>AREA_FILTER){ //filter small rectangles
我们将在对象周围找到边界框。true表示对象已关闭。
float peri = arcLength(contours[i],true);
我们将找到矩形。
approxPolyDP(contours[i],conPoly[i],0.02*peri,true); if(area>maxArea && conPoly[i].size()==4){ //find biggest (4 for rectangle) maxArea = area; biggest = {conPoly[i][0],conPoly[i][1],conPoly[i][2],conPoly[i][3]}; }
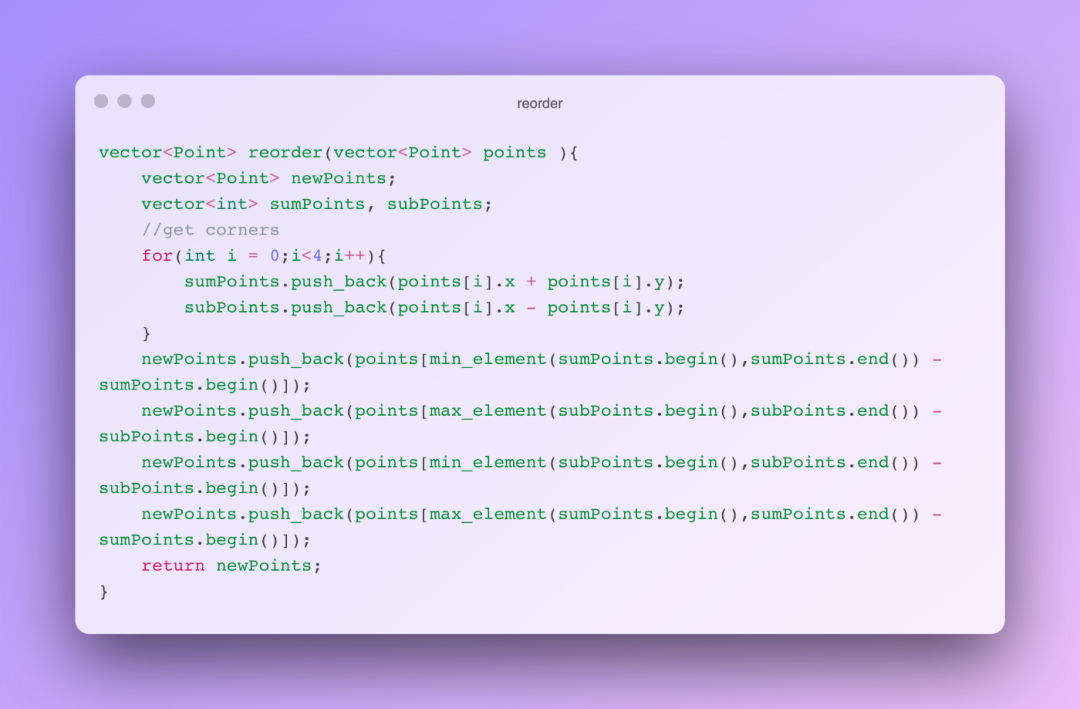
我们得到对象的点;
docPoints = reorder(initialPoints);
扭曲:
imgWarp = getWarp(imgOrg, docPoints, w, h);
参考

