AutoX距“全无人”更进一步:发布中国首份无人驾驶安全报告
应美国交通局及国家公路交通管理局号召,加州DMV规定,想要拿到无安全员的“全无人”驾驶牌照,申请过程中有着不可或缺的一环:安全报告,申请公司需要对外发布对系统的安全性进行全方位的评估的报告,验证技术可靠性。
目前已发布报告的均是少数无人驾驶领域的领跑者,包括上周刚获得加州对外载人许可的Zoox,以及谷歌Waymo(两个月前获得了加州第一张全无人驾驶牌照)。
12月26日消息,刚刚获得粤港澳大湾区第一张路测牌照的自动驾驶公司AutoX发布了其安全报告,报告全名为“AutoX 安全要义”,共39页,这是首次有中国背景的L4无人驾驶公司发布安全报告。
前Uber自动驾驶负责人Anthony Levandowski曾对之前各大无人车公司发布的安全报告评价道:“这些所谓的《安全报告》不过是各种陈词滥调和营销材料包装的废纸罢了”。除了Waymo,目前鲜有公司在安全报告中深入讨论安全技术细节, 然而发布技术细节则代表着一个明确的信号:象征着一家公司已经过了“有人测试”阶段,开始去掉安全司机、让车辆达到“全无人”驾驶状态,准备无人商业化运营。
与之前大部分发布的安全报告不同,AutoX的报告中包含大量技术细节,详细阐述了为保障系统冗余性及安全性所做的努力,以及相应的测试及验证措施。这充分体现了AutoX强大的车载系统安全设计的工程能力。
毫无疑问,AutoX也是在通过这份报告表明自己的态度和决心,也标志着华人无人驾驶技术迎头赶上世界最顶级水平迈开了重要的第一步。
人机互动与安全
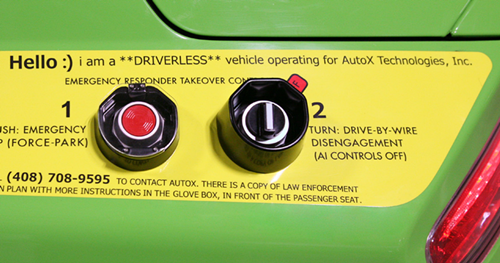
AutoX的报告中提到了一些其他如Uber、Zoox等公司没有提及的安全功能:紧急停止及脱离开关。此项核心技术对交警监管部门与无人车的安全交互具有重大意义,能让交警部门安全地停止一台无人车,防止如无人车不听指挥等任何意料不到的事故发生。AutoX将其总结为:“把控制交还至人类手中”。
值得注意的是,这项技术恰恰是加州DMV对全无人牌照的核心硬性要求之一,然而在大多数除Waymo之外的无人车公司安全报告中对此只字未提。
AutoX在车辆内和车后侧安装了紧急停止按钮,以及驾驶模式转换开关,以防意外发生。在系统完全失灵的极端情况下,交警等执法人员或其他事故现场的人可以通过按钮停止无人驾驶系统,然后通过转换开关来驾驶和挪动车辆。
AutoX在车辆上还有多项一些人机互动(HMI)的设计,包括远程操控员呼叫装置,和车辆驾驶状态展示。
第一项比较好理解,无人车的商业部署需要完善的后台操控中心和远程监控、接管的能力。第二项是指在车辆后挡风玻璃上方安装有一块LED屏幕,实时可以显示车辆当前的行驶状态:无人驾驶模式、远程控制模式、人工驾驶模式。毫无疑问,显示车辆行驶状态对周围的车辆和行人都是很好的提示,可以帮助他们早做准备。
紧急停止及脱离开关、远程接管、驾驶状态显示均为加州DMV对无人测试牌照的必备要求。
最大技术亮点:全栈冗余
AutoX的这份报告主要分为四大部分,涉及车辆及技术细节,如何保障系统安全及冗余,如何对系统进行测试及验证,以及非技术方面的安全措施。这份报告内容丰富,在目前发布的所有公司安全报告中,提供了最丰富的技术细节和整体设计理念,感兴趣的读者可以下载后(下载链接:https://autox.ai/safety)详细阅读,下文则提取了一些独具创新性的关键信息。
对于AutoX,外界并不陌生,因此对其技术方案方面只作简单概况。
AutoX是目前少数有能力开发全栈无人驾驶技术的公司,其独创的双A.I.融合感知无人驾驶技术路径,目标直指L4级别的完全无人驾驶系统。整个软件栈包括了定位、感知、预测、决策及规划,控制等五大模块。
在传感器的配置上,AutoX使用了多传感器冗余设计,即一个激光雷达加上多个环视摄像头为主,同时辅助以毫米波雷达、超声波雷达等传感器,可以实现对周围环境360度的感知。

这份报告中,最亮点的是其中提到“全栈冗余”的概念。报告中写到,“AutoX在软硬件中均设计了一种多层冗余架构,并且引入了‘最高等级的安全冗余’,即人类远程操控。我们相信通过设计高度冗余的系统,可以最大限度地减少发生故障的可能性。”
提到无人驾驶系统的冗余性,一般是从传感器角度考虑,通过多种硬件的组合来保证安全,而全栈冗余的特点在于涉及从传感器到AI系统,再到系统测试及复杂场景应对的各个环节。具体来说,AutoX的全栈冗余包括六大方面:传感器层、算法层、AI层、系统层、硬件层、以及人类辅助层。
传感器层如上所述,AutoX使用的是激光雷达加摄像头的双主传感器,不存在主次之分,其融合技术可以综合多个传感器的数据,提供稳定可靠的感知能力。
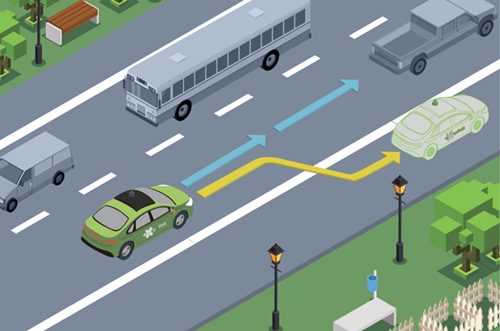
在算法层,AutoX设计了一套时刻存在备份方案的规划及决策算法架构,比如在给定的路径规划任务中,决策和规划模块会同时基于多个标准检查各种输入信息,选择风险最小的安全行驶路线,而且有趣的是,无论当前任务是什么,规划及决策模块都会事先计算出一条临时停车路线,以应对紧急情况。
AI层的冗余是AutoX非常独特的一点,其无人驾驶系统相当于有两个AI大脑,一个是基于三维高清地图感知的AI大脑,第二套是实时的驾驶环境感知AI大脑。两套AI大脑会同时进行运算,根据两者的计算输出鲁棒性的融合结果。
在系统层,AutoX设计了一个去中心化的双计算系统,使用两个具有同等计算能力的工业化的计算平台,每个平台均有紧急后备程序,并有独立的线控系统。
在硬件层,则是在电源、紧急停止按钮、连接装置等各个环节均有备份。
最后,在特别复杂的交通环境下,AutoX还设计了一套人工远程操控系统,在必要情况下驾驶员可以远程操作无人车,处理AI无法应对的情况。其远程控制分为两种模式,一种是完全接管,另一种是混合辅助,在后一种模式中工作人员只需要给出决策指令,无人驾驶车辆即可在复杂场景中自行完成后续任务。
完备的测试及验证流程
AutoX在报告中还描述了其对无人驾驶系统进行测试和验证的整个流程,任何新増的功能都需要经过这一流程的检验。
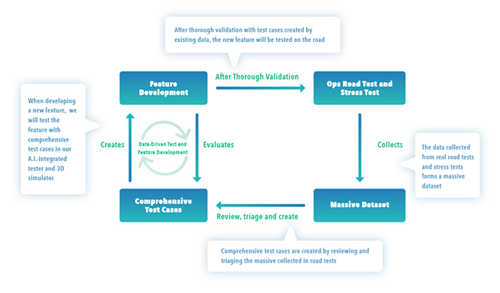
第一步是在3D仿真环境中进行测试。与Waymo发布的安全报告一样,AutoX也重点强调了仿真系统的重要作用,该系统可以模拟道路环境的物理设计、车辆的动力学及碰撞等信息,也能模拟了下雨、夜间、光照直射等天气情况,可以帮助加速无人驾驶系统的开发。

在初步测试后,AutoX会在真实车辆上进行测试。首先是在封闭的停车场环境中测试,用一系列很困难的场景来模拟真实驾驶场景;等到系统足够安全后,才会进行开放道路测试,而且所有测试车辆都会处在经过训练的安全驾驶员及远程操控员的监视之下。
在测试流程部分,报告中还有一个值得注意的小细节,也就是车辆每次出车前都会进行安全检查,而且如车胎、安全气囊、刹车等硬件状况都会由技术人员时刻监测。
从这份安全报告来看,AutoX的技术已经考虑到了安全的方方面面,为货真价实的完全无人驾驶做好了准备。除此之外,AutoX刚刚拿到了粤港澳大湾区第一张第三方权威认证的城市路测牌照,马上将进行正式大规模测试。接下来的问题恐怕是,普通用户做好迎接无人驾驶的准备了吗?
