最新!搭载“全自动驾驶”功能的特斯拉工程车照片泄露
智车科技IV近期马斯克的特斯拉备受质疑,但具有"钢铁侠"之称的他岂会坐以待毙。近日,一张与特斯拉工程车屏幕类似的图片在Twitter上泄露,并被迅速移除,从图片中看到了Autopilot显示:Full self driving功能,说明特斯拉的"全自动驾驶"工程车已经在测试,屏幕上的视觉识别图像相比16年有了很大变化。

Autopilot显示:Full self driving功能
特斯拉最近的日子并不好过,前几天发生的事故还历历在目,特斯拉史上最大规模召事件也让其元气大伤,华尔街断言:“特斯拉很可能在未来3到6个月内就将无法生存。"
虽然近期马斯克的特斯拉备受质疑,但具有"钢铁侠"之称的他岂会坐以待毙。近日,一张与特斯拉工程车屏幕类似的图片在Twitter上泄露,并被迅速移除,从图片中看到了Autopilot屏幕显示:Full self driving功能,这说明特斯拉的"全自动驾驶"工程车已经在测试。

去年的黑客入侵事件
去年,一名特斯拉社区黑客成员曾入侵了特斯拉汽车软件,进入了Autopilot调试模块。特斯拉的第二代自动驾驶仪相当复杂,简而言之,它包含一种称为特斯拉视觉的计算机视觉技术,该技术使用来自车辆周围的8个摄像头(目前主要是3个前置摄像头)的图像,与GPS和雷达数据滤波之后帮助车辆行驶。特斯拉通过整个车队收集的数据,制作“高精度地图”,车辆可以根据其位置下载地图“片段”,并使用它们更好地自主驾驶。特斯拉视觉系统也可以帮助车辆正确行驶或检测车道标记以方便驾驶。
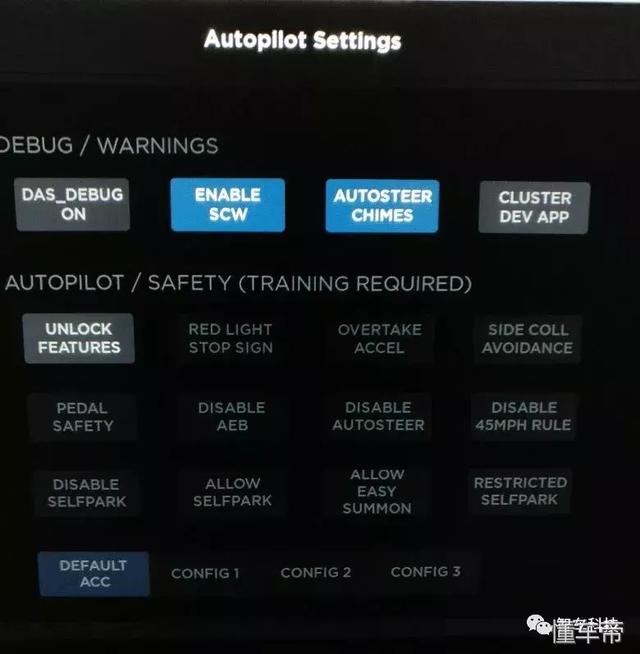
特斯拉社区的黑客设法破解了特斯拉自动驾驶仪,可以显示系统正在使用哪些指标来做出决定:
而且一些特斯拉车主当前无法使用的设置也被曝光。
那时并没有发现“Full self driving功能”,特斯拉迅速修复了这一漏洞。
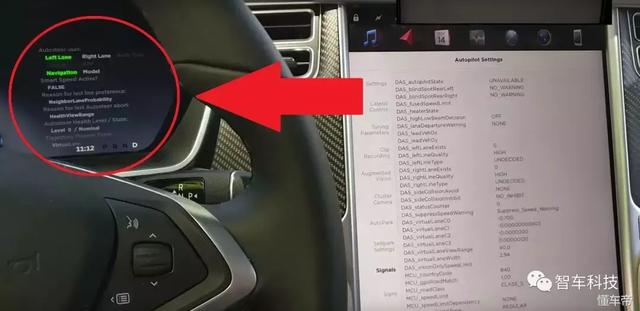
而现在一张形似特斯拉工程车相同屏幕的图片在Twitter上被曝光,并透漏:在“Augmented Vision(增强视野)”选项卡下,可以看到从摄像头反馈的信息里,自动驾驶仪标识了车道线和障碍物。

这与我们在2016年特斯拉宣布推出Autopilot 2.0时,其制作的官方视频中看到的识别类似,却有所不同:对车道线识别更清晰,对物体的标识也有很大不同。
这暴漏了未来特斯拉将推出的Autopilot 2.0的“完全自驾”功能,特斯拉可能改变之前的物体识别方案,同时用算法增强了对车道线的识别。
此图一出,国外网友就开始了对特斯拉这项新改变的激烈讨论:
@Karen
看起来像摄影测量拼接技术。任何完成摄影测量或照片拼接工作的人都会认识到这些。它们不一定是被识别的对象,只是为视觉相似性通过一定阈值的配对点。从 他们可以确定多个图像到它们是否来自不同的相机位置,场景的几何形状中匹配在一起。其实人类本身也潜在地使用摄影测量来估计距离。不同的是,人类可以使用逻辑来自动纠正错误。 “我右眼看到的一部分和左眼看到的一部分,显然不是同一件事。”
@Max
我如果理解没错的话,这是特斯拉在制作世界的“三维”地图? 他们或许是通过使用这个来避免LIDAR,让汽车“记住”某些点与相关其他点吗?
@Henrik Mikael Kristensen
这辆车可能配备了立体摄像头,用于训练当前汽车中单相摄像机的深度测绘系统。
有趣的是,特斯拉还专门定义了一个名为“完全自驾”的选项卡,去年黑客进入该模式时并不存在。
据推测,该系统可以使软件不断迭代更高级的版本,与演示视频中一样,它可以处理交叉路口,但目前并没有在公开的Autopilot版本中启用。
正如之前的报道,最新的Autopilot做了多次更新,在特斯拉重新编写了神经网络代码之后带来了一些重大改进:车道居中似乎明显改善,转向虽然仍然通常留在车道内,但保持车辆更“集中”在车道中。
最近发生特斯拉Model X致死事故也给了我们一个警示:驾驶员仍然必须始终关注并始终准备好控制。
目前特斯拉计划何时推出更高级别的自动驾驶系统还尚不可知,但马斯克最近表示,“自动驾驶汽车将在明年年底前实现所有驾驶模式”。经过种种质疑之后的马斯克依然胸有成竹,既然选择抛弃激光雷达方案,必定要在视觉算法付出更多的努力。
