无人车如何先感知、再决策?揭秘自动驾驶背后的“黑科技”
智能相对论文|李永华
来源|智能相对论
科技快速发展的年代,我们越来越不能轻易地“预测未来”,因为总有那么多意料之外在等着我们。
几年前,我们还认为无人车仅是作为科幻电影里的炫酷桥段,然而现在,公园、封闭园区、大学校园等场景下,都会看到无人车的身影,由于其高科技的便捷应用与可爱的外形设计,迅速受到网友围观,成为名副其实的“网红”。
网红无人车的出现,之所以一度成为社会热议的话题,是因为过去我们没想到无人驾驶时代这么快就要到来,并让我们不自觉地想对支撑其快速发展的背后黑科技一探究竟。
无人车驶向前台,无限AI黑科技藏在身后
表面上“急速狂飙”的无人车,背后都有AI“黑科技”加持,“黑科技”足够真,才能让“网红无人车”不再仅是网红。
事实上,无人车和人开车的过程差不多,先用眼睛看,脑子根据眼睛看到的东西做出决策、指挥操作。
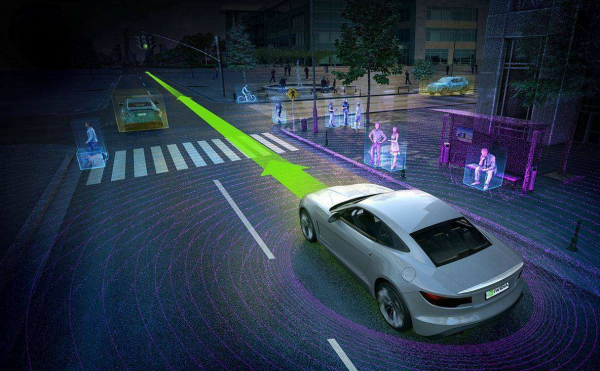
前者,被称作感知系统,当然它比人眼只是“感光”要更复杂,主要通过激光雷达(确认车辆所处三维位置)、摄像头(获取图像信息)、IMU陀螺加速度计(确认行进角速度)等多路传感器,把路标、分道线、车道、汽车、行人、物体、车辆位置、行进状态等各类信号输入到计算后台,这个阶段的要求是尽可能“看”得细、“看”得准,不能遗漏或错误判断。
后者,即“芯or脑”决策的问题,简言之,就是把各路传感器弄回来的信息整到一起,通过提前预设好的模型算法(类似人脑的思维方式和思维过程)得出车辆在此时以及未来一段时间应当如何行驶是最好的,并据此下达指令。
总体而言,由感知+决策构成的无人车系统(日后延申至自动驾驶系统),其整个过程的实现主要有三种方式,对应三路AI“黑科技”。
一路是“LiDAR派”(Light Detection And Ranging激光探测与测距),激光一扫,周围的环境变成数字世界的3D模型,然后结合毫米波雷达、摄像头等辅助,AI能力告诉车子,“嘿,这个数字世界里,我们应该在这个位置,这下会走了吧。”
一路是车路协同方案,这个方案的精髓是大搞基建,在路的两边高密度布置基站,把雷达扫描的信号发送给经过的汽车,再配合精密地图从而实现自动驾驶。
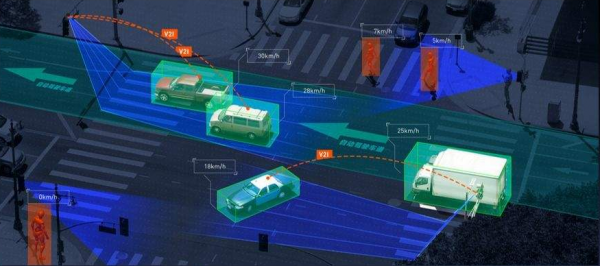
搞车路协同需要很大的基础设施投入,建设周期也很长,不过一旦搞成功了,单台自动驾驶汽车自己的成本就大大降低了——主要靠别人提醒,自己不用怎么武装大脑。
从上图也可以看出,这个方案需要高精地图协作,与基站形成配合。
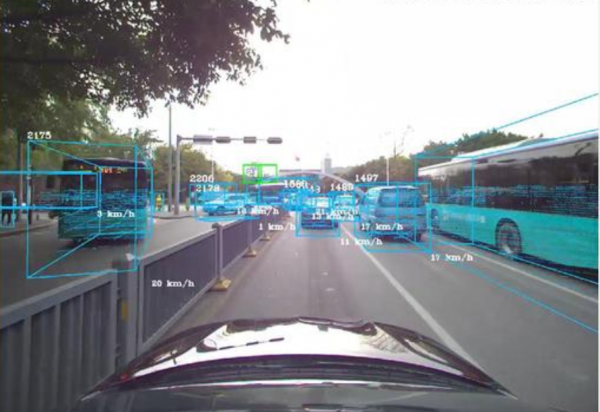
最后一路是所谓的“低成本方案”,马斯克是其大力鼓吹者,工具简单,和人只靠眼睛一样,摄像头加上毫米波雷达“就能”实现自动驾驶,激光、基站统统丢掉。这个方案有个好处,只考验“不太花成本”的AI算法能力,而这种能力的获取将受到未来业界追捧。
AI算力背后的“黑科技”
业界公认,阻碍AI产业规模化发展的原因主要是开发效率低,标注、训练、部署整个过程耗时,以及稀缺与昂贵的算力。AI产业若要规模化走进各行各业,助力企业AI产业化应用,就必须要降低AI开发门槛和难度。而开发者在AI开发过程中也存在诸多痛点,例如,无法对海量数据进行存储与分析,对于普通开发者来说,面对快速增长的算力需求力不从心。深度学习作为人工智能崛起的主要原因,是开发者必须要学习的技能,但是对于普通开发者而言,掌握深度学习模型训练的时间成本相当高,这也阻碍了AI开发者的开发效率。
可见,AI算法能力的获取,并非易事。也就是说,网红无人车从“网红”到寻常百姓家,还差些许火候。
日前,华为云人工智能大赛·无人车挑战杯正式开赛,华为云一站式AI开发平台ModelArts、端云协同解决方案HiLens作为整场赛事的技术支撑,为参赛开发者提供了AI开发、云端创意无限的可能,即AI算法背后的“黑科技”。
华为云人工智能大赛·无人车挑战杯参赛选手用车
华为云ModelArts作为一站式的AI开发平台,集跨场景、软硬协同、端云一体等多方位的优化经验,提供了自动学习、数据管理、开发管理、模型管理、推理服务管理等多个模块化服务,真正做到满足不同程度的开发者,快速独立的开发出自己的AI模型。
在无人车场景下,华为云可以支撑开发者实现一站式全流程开发,基于华为ModelArts AI开发平台训练算法,通过HiLens平台做技能开发并部署到HiLens Kit(端侧设备)进行推理,其超强的算力,丰富的接口,为开发者提供AI开发的极大便利。
在本次无人车大赛中,参赛者运用华为云ModelArts平台训练好各类算法模型,然后把模型导入HiLens平台进行业务逻辑编写,完成技能开发,并将技能一键式部署到HiLens,快速实现红绿灯检测、行人避障、线路识别、目标跟随等自动驾驶功能。这样实现了从云到端的一体化,降低了参赛者训练时间和算法移植成本,提高了效率。
让“感知”更容易实现、让“决策”方案更容易训练出来,华为云ModelArts、HiLens在这场竞赛中为学生们提供了后台各种数据、高速算力、快速部署能力,学生们只管放飞自我研究如何让无人小车更聪明地感知世界和自动行驶。
这也反应出AI开发的一个趋势:创新的只管创新,其他“后勤”平台给你包圆了,你要做的是肆意发挥创新,多多灵光一闪,想出什么让汽车更聪明的绝妙法子。
那么“感知”和“决策”两个部分,究竟是如何实现的?
1、感知:让获取和处理外界信息的门槛更低
先来看华为云HiLens(官方定义“更懂开发者的视觉AI应用开发平台”),AWS(亚马逊云)也有类似的Deeplens,简单说就是由一个具备AI能力的摄像机以及它背后云上开发平台构成。

华为云人工智能大赛·无人车挑战杯选手用车外壳安装
我们知道,AI需求深入到大量的细分行业,尤其视觉AI在传统汽车、安防、娱乐、物流、医疗、交通都有应用,云计算平台不可能都有现成的方案,得靠企业们自己去开发。
例如,那个让你交10块钱的停车场识别车牌就是视觉AI的成果,只不过它已经十分成熟。
但这个开发过程,又要采集数据,又要整合数据,还要自己搞模型搞算法,十分麻烦,这时候HiLens出现了,具体技术细节不多说,总之视觉AI变得和拍摄DV一样简单,架起专用设备,连接好网络,就可以开始开发。

华为云人工智能大赛·无人车挑战杯HiLens摄像头模块
由于无人车涉及大量图像处理,华为云HiLens的辅助意义不言自明,参赛者作品很多基础视觉AI能力架设可以凭借HiLens快速完成。
华为云人工智能大赛·无人车挑战杯小车识别红绿灯功能
2、决策:只要管好“最黑”的部分
一辆汽车该如何让自己“感知”到的东西转化为决策,通过华为云ModelArts,AI开发在易用的同时获得了极强的算力支持:
提供了开源的数据集,AI模型最需要的数据喂养不需要自己到处去搜罗和积累;
通过某些技术处理,可以实现自动学习+自动训练模型,例如,在无人车领域,可以“一键做无人驾驶”;
大功告成,你在ModelArts上把模型搞出来了,这时候还能一键式部署到你想要的地方去,比如可以部署到HiLens端,实现云上决策算法模型与云下端侧数据感知的拉通,这就是无人车背后真正的黑科技。

华为云人工智能大赛·无人车挑战杯参赛选手编程显示模块
以无人车为代表,AI的难题总结起来有三点:第一部署太难;第二是开发不容易;第三是算力不够,这让小开发商望而却步。华为云ModelArts与HiLens搭配,支撑开发者实现一站式AI全流程开发,更好的激发开发者创新热情、也将加速AI在各细分场景落地。

文末彩蛋:华为云人工智能大赛·无人车挑战杯比赛
今日,科技部在2019世界人工智能大会宣布,将依托华为建设基础软硬件国家新一代人工智能开放创新平台,面向各行业、初创公司、高校和科研机构等的AI应用与研究,以云服务和产品软硬件组合的方式,提供全流程、普惠的基础平台类服务。随着8月23日昇腾910正式商用以及MindSpore的发布,华为全栈全场景AI解决方案全面完成构建。面向开发者,华为云ModelArts全流程模型生产服务打通了从数据处理-模型开发-模型训练-模型部署的AI全链条,可将生产所需的所有服务一站式提供,全方位提升训练和推理的计算能力。可见,凭借30年在ICT行业经验积累以及领先的全栈全场景AI能力,华为期待把“黑科技”运用到极致,加速构建万物互联的智能世界。
另外,打个小广告:9月19日,“华为云无人车挑战杯大赛”总决赛将亮相2019华为全联接大会,并最终决出冠、亚、季军团队以及优胜奖团队,欢迎关注。

【完】
智能相对论:AI新媒体,今日头条青云计划获奖者TOP10,文章长期“霸占”钛媒体热门文章排行榜TOP10,著有《人工智能 十万个为什么》,重点关注领域:AI+医疗、机器人、智能驾驶、AI+硬件、物联网、AI+金融、AI+安全、AR/VR、开发者以及背后的芯片、算法、人机交互等。
