Linux从头学:一文理解【任务管理】和【任务切换】
道哥分享LDT:局部描述符表
TSS: 任务状态段
TCB: 任务控制块
x86 系统中的保护模式,给系统的安全性提供了很大的保障,但是在我们之前的文章中,一直都淡化了特权级别这个概念。
例如:在保护模式下的段选择器,我们一直都只把它看做一个段描述符的"索引号",用来在 GDT (全局描述描述符表) 中查找一个段描述符,例如:
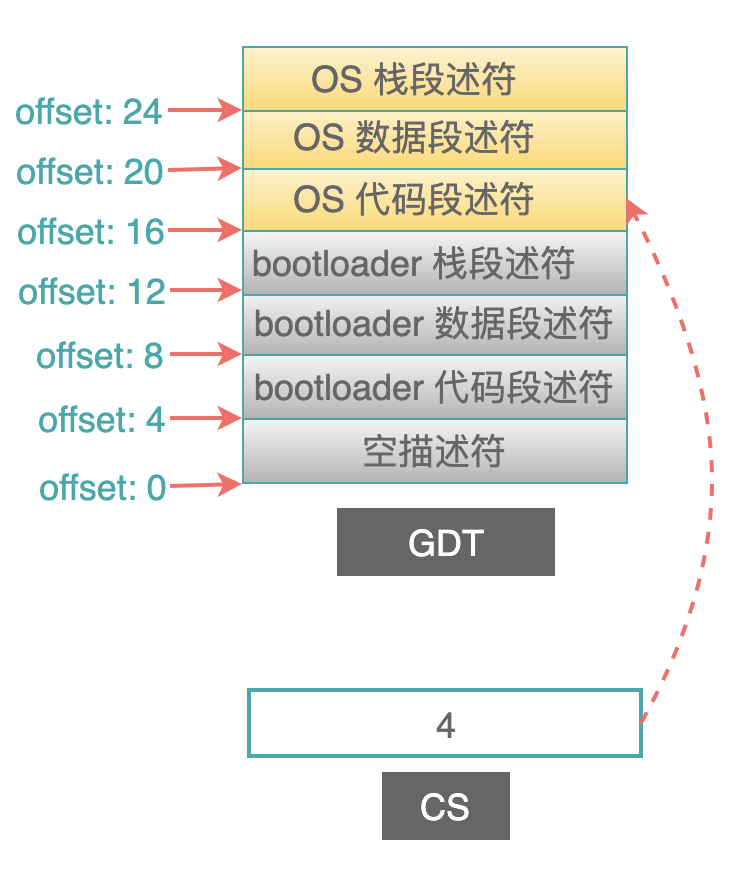
图中:代码段寄存器中的索引号是 4 ,GDT 中每一个表项占用 4 个字节,于是就在偏移量为 16 的位置,找到了代码段的描述符,进而从描述符中找到代码段的起始地址和长度界限。
数据段、栈段的操作过程也是这样的。
从现在开始,我们需要让用户程序拥有自己私有的描述符表 LDT(Local Descriptor Table),并且拥有自己的特权级别(总不能让用户程序与操作系统一样,工作在非常高的 0 特权级别)。
因此,我们需要纠正之前的错误:段寄存器中,不仅仅有段的索引号,还有另外两个属性:TI 和 RPL,如下图所示:
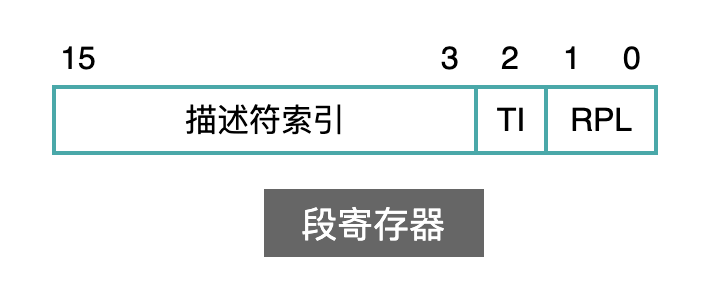
TI 标志位:表示到哪个表中(GDT or LDT)查找描述符;
TI = 0: 到 GDT 中查找描述符;
TI = 1: 到 LDT 中查找描述符;
RPL(Request Privilege Level) 标志位:表示想给段寄存器赋值的请求者(也就是一段代码),它的特权级别;
此时,继续把段寄存器中的内容称作段索引符就不合适了,一般称作:选择子。
LDT:局部描述符表
在上一篇文章中,操作系统把应用程序从硬盘读取到内存中之后,为应用程序创建了三个段描述符,这三个段描述符都放在了 GDT 表中,这是不合理的。
首先,在多任务系统中,应用程序的数量是不确定的,应用程序也会执行结束。
如果把所有应用程序的段描述符都放在 GDT 中,对于操作系统来说,管理这个数据太复杂。
其次,当引入特权级别之后,如果应用程序的段描述符放在 GDT 中,那么就意味着应用程序需要有权限来访问 GDT,而 x86 系统中只有一个 GDT(所以叫做 Global Description Table),只能被操作系统访问。
因此,操作系统需要为每一个应用程序,单独申请一块空间,用作这个程序自己的段描述附表,称作:LDT(Local Description Table)。
例如:现在系统中有 2 个用户程序: APP1 和 APP2,操作系统在加载每一个应用程序的时候,就会在应用程序自己的内存空间中,申请一块,用作 LDT:
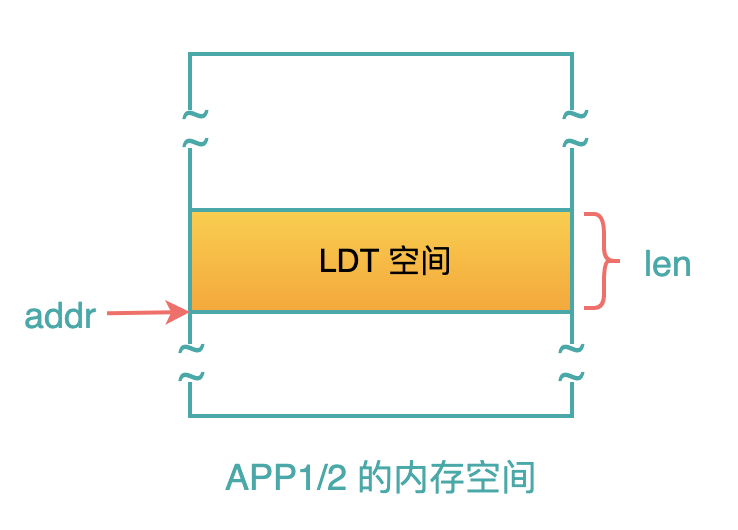
为什么是 “应用程序自己的内存空间”?
因为每一个应用程序,都独享 4G 大小的虚拟内存空间。
在 LDT 中,存放着当前应用程序自己的段描述符信息,例如:代码段、数据段、栈段。
LDT 所占用的空间也属于内存的一部分,有起始地址和长度界限,因此也需要为它创建一个段描述符,这个描述符就放在 GDT 中。
在 Linux 应用层,我们会严格的区分进程、线程,但是在系统的底层,这样的区分界限已经比较模糊了,用任务 task 来称呼更通用些。
根据刚才的假设,现在系统中有 2 个用户程序,那么处理器怎么知道:当前正在执行的是哪一个应用程序的 LDT 中的代码?
正如处理器中有一个寄存器 GDTR,保存着 GDT 的开始地址和长度,处理器中还有一个寄存器 LDTR,存储着当前正在执行的那个应用程序的 LDT 开始地址和长度:
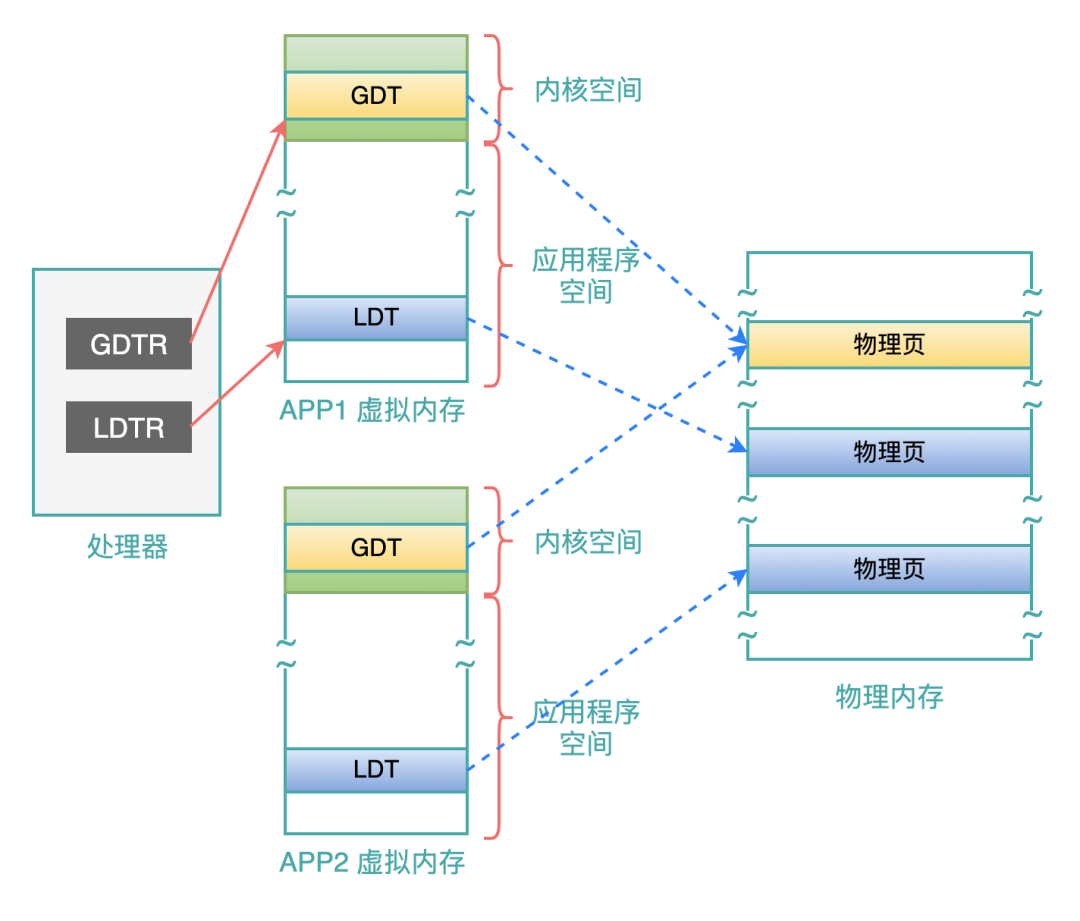
所有应用程序的虚拟内存的高端地址部分,映射的都是操作系统的内存空间,按照 Linux 中的做法,3G ~ 4G 空间被操作系统使用。
图中的绿色部分,表示操作系统空间(1G),在分页机制下,它们都映射到相同的物理内存页上(蓝色虚线箭头)。
当操作系统切换到应用程序2时,处理器中的 LDTR 就会被赋值为应用程序2 的 LDT 的线性地址和长度信息。
GDTR 中的内容不变,因为每个应用程序中的 GDT 都是从操作系统“继承”而来的,开始地址和长度都是一样的。
TSS: 任务状态段
顾名思义,任务状态段就是用来存储和恢复任务的状态信息。
经常听到一个术语:任务上下文。
所谓的上下文,就是体现一个任务正在被执行时的环境信息,主要就是处理器中的各种寄存器内容,也就是下面这张图中的寄存器们:
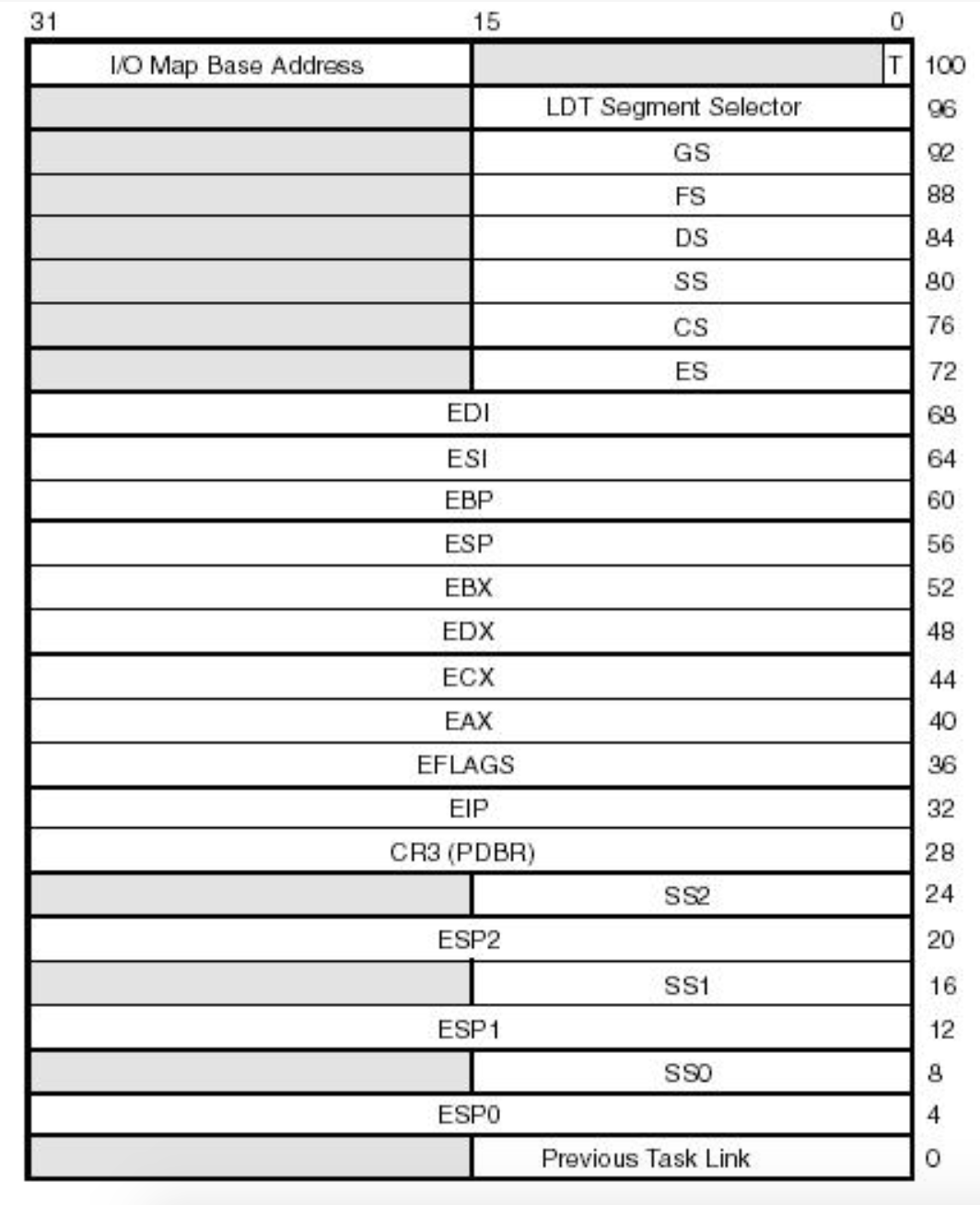
这张图反映了一个任务上下文的所有寄存器信息。
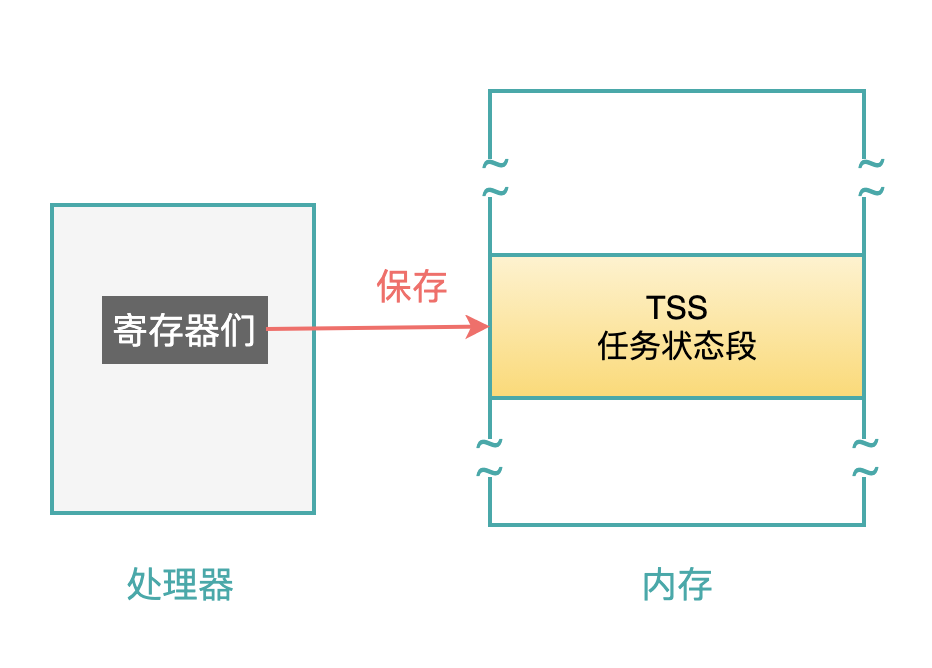
当任务被调度器中止执行之前,需要把这些寄存器中的值都保存下来,相当于做一个快照。
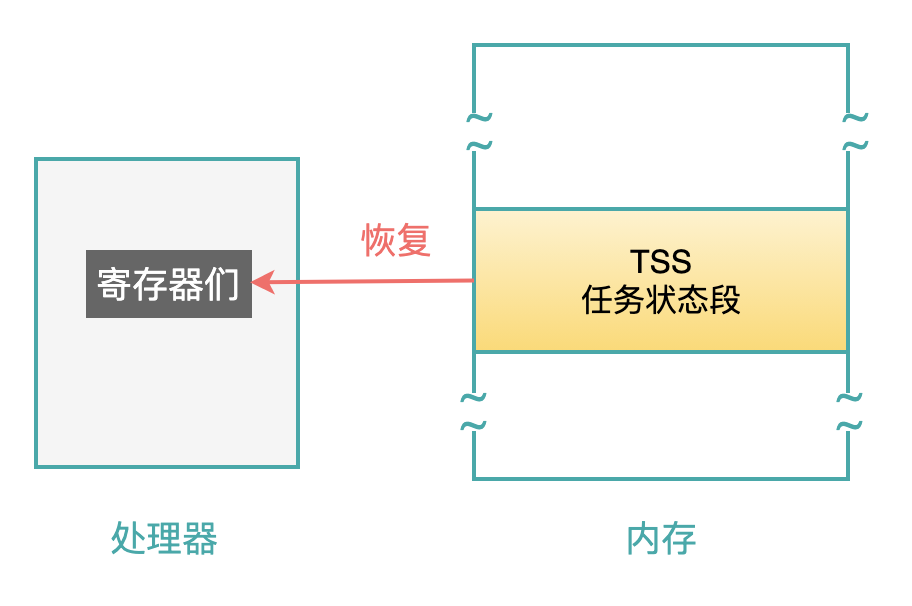
当这个任务以后又被恢复执行时,再把这个快照中保存的信息,原样的赋值给图中的所有寄存器,这样就称作恢复任务上下文,这个任务就从上次被中止的地方继续执行(因为指令指针寄存器 EIP 被恢复了)。
就如同 LDT 一样,TSS 也是操作系统为应用程序分配的一块内存空间,只不过这块空间是位于操作系统的势力范围内,只能由操作系统来操作。
TSS 也有起始地址和长度界限,也需要为它在 GDT 中创建一个段描述符。
与 LDT 类似,在处理器中也有一个寄存器 TR,用来指向当前正在执行的那个任务的 TSS。
当进行任务切换的时候:
首先,把处理器中的寄存器内容,存储到 TR 寄存器指向的 TSS 段中(即将被停止的任务);
然后,把新的任务的 TSS 段中的内容,复制到处理器的各寄存器中,并且把 TSS 地址赋值给 TR 寄存器;
TCB: 任务控制块
任务控制块,可以说是系统中用来管理任务的最重要的数据结构了,操作系统用来管理任务的所有信息都可以放在这里。
看一下 Linux 2.6 内核代码中的结构体:struct task_struct{ ... },就知道 TCB 有多复杂了,有些书籍上也称之为 PCB(Process Control Block,进程控制块)。
在这个结构中,一些常用的信息包括:
程序的加载地址;
任务的优先级;
任务的当前状态;
任务打开的一些资源:网络、文件设备等待;
。。。
需要注意的是:上面的 LDT、TSS,是 x86 处理器中设计的运行机制,是处理器要求这样的。
而 TCB 不是处理器要求的,它是操作系统的实现者自己来构建的,因此可以根据自己的需要来进行设计。
每一个应用程序需要一个 TCP 结构,所有的 TCB 结构就可以构成一个链表,便于操作系统来管理。
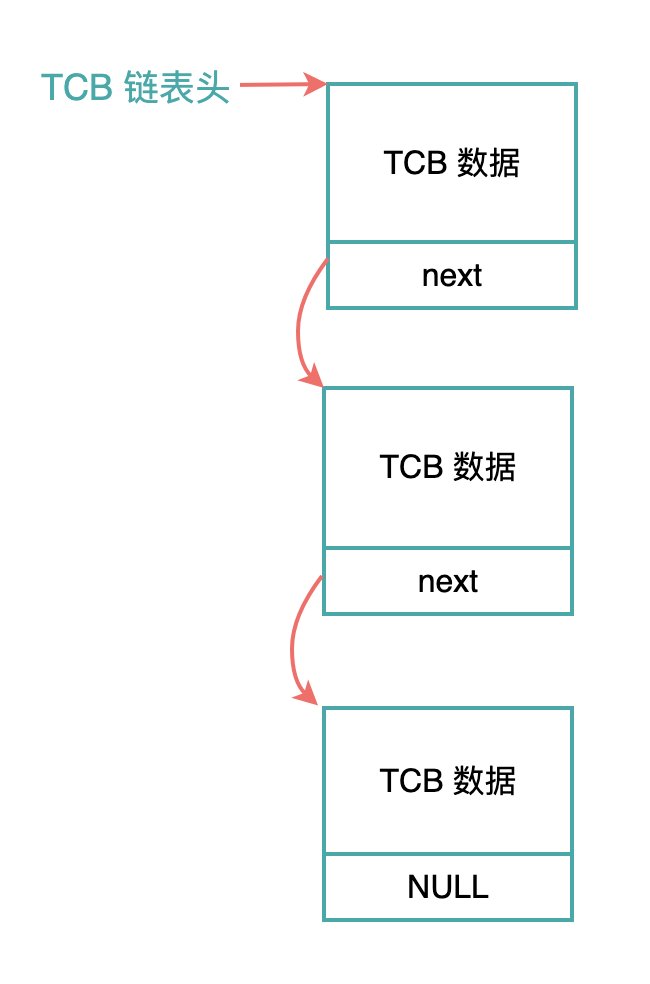
比如:在发生任务切换的时候,就可以顺着链表头,一次扫描链表上的每一个 TCB 节点。
如果找到了当前正在被执行(即将被中止)的任务,就把这个任务的状态标记为暂停,并移动到链表的末尾,然后把链表头部的第一个处于 ready 状态的任务,加载到处理器中去执行。
当然,Linux 系统中的处理过程更为复杂,它把每一个任务按照优先级放在不同的等待队列中,然后利用哈系桶算法来查找任务。
------ End ------
x86 处理器中的这三个概念,对于理解任务切换非常重要。
写到这里,我总是觉得以上的文字描述还是有点朦朦胧胧,也许是自己还需要进一步的理解其中的脉络。
就先这样吧,以后想到更好的描述方式了再与大家分享,谢谢!
