斯坦福大学开发机器狗Doggo
虚拟制造据外媒报道,波士顿动力公司(Boston Dynamic)的机器狗现在有了一些新的友好竞争,比如这个由斯坦福大学学生设计的四足动物机器人Doggo。据了解,他们将把设计开源化,目的是希望能够通过低成本让机器人技术取得进步。

Doggo是斯坦福大学学生机器人俱乐部Extreme Mobility团队的杰作。该团队的目标是开发出一款价格适中、复制起来相对容易的机器人。团队指出,类似的机器人设计使用定制部件,成本高达数万美元,这表明有时技术尖端的机器人系统可能超出许多研究人员所能承受的范围。
机械工程专业的内森·考Nathan Kau是Extreme Mobility研究项目的负责人,他说道:“我们在研究中也见过其他四足机器人,但它们不是你可以带到自己实验室用于自己项目的东西。我们想让斯坦福大学的Doggo成为一个开源机器人,你可以用相对较少的预算来打造你自己的机器人。”

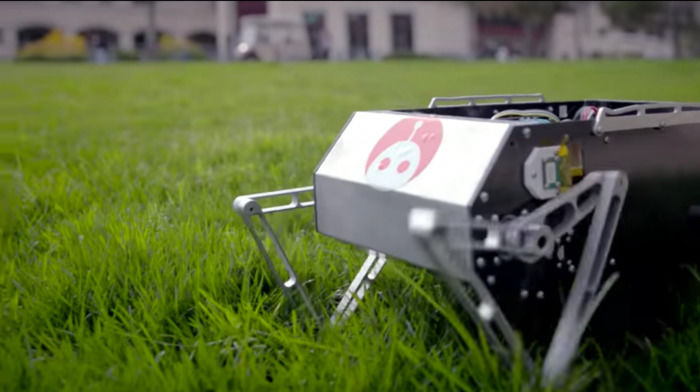
据了解,斯坦福大学的这个Doggo几乎完全由现成的组件组装而成,成本不到3000美元。它在发动机和外部力传感器的帮助下能够完成各种各样的动作,安装在它们身上的传感器每秒可以进行8000次计算以此来决定每条腿需要施加力和扭矩的大小。
虽然团队花了大约两年的时间进行了改进工作,但由此取得的成果是明显的、令人印象深刻的。首先,它可以保持稳定的步态,并通过不平坦的地形。另外,它还可以执行团队所称的标志性动作,一种跳跃舞蹈式的动作,当它只依靠马达和通过移动腿来创造视觉效果时,它看起来就像有内部装有弹簧一样。
不过团队对Doggo的跳跃技术最为深刻。他们意识到,在没有优先考虑动作的情况下,机器人可以跳两英尺(60厘米)高。通过一次又一次地调整软件,团队能够让它跳到3.5英尺(100厘米)高的空中,并且在跳跃过程中他们让它完成了后空翻。


但团队并不打算止步于一两个后空翻。开放源代码意味着研究人员可以为任何想要拥有自己机器狗的人提供了详细的计划、代码和必要组件列表。
现在,团队正在努力开发第二代Doggo,它将会更大、更先进。
