Ai芯天下丨趋势丨自动驾驶也有摩尔定律,完成最终蜕变或在15年后
Ai芯天下前言:
近年来自动驾驶汽车发展则是进步显著,以至于一种声音对于自动驾驶汽车10年内普及完成持肯定态度,不过另一种声音自动驾驶汽车距离现实生活还比较遥远,至少10年内无法实现全民普及。
不安全的自动驾驶发展再快也无济于事
有一部分行业内部人士认为,并不是说L4级未来不能实现,而是十年之内,普通道路上的L4级自动驾驶汽车量产很难实现。
目前L5级自动驾驶汽车处于萌芽期,L4级自动驾驶汽车处于概念期,预测L4级产业化、规模化应用应该还是10年之后,包括麦肯锡、法国YOLE等咨询公司都表示,至少2030年以后才能实现L4级的量产。
L4级自动驾驶要实现落地,一定不能忽视车路协同,人和车、车和车、车和路之间需要默契配合,这些都需要信号的支持,而十年之内不可能实现让所有汽车能开到的地方都有信号。
从辅助自动驾驶技术到完全自动驾驶技术都可以应对,而实现不了的是L4级和L5级自动驾驶所应对复杂场景,自动驾驶的终极挑战是辨别人的意图,而这些都是10年内无法解决的问题。
因此,L4级自动驾驶汽车实现量产的故事很美好,但10年之内或者可预见的短期内难以全面普及。

摩尔定律下的自动驾驶速度
无人驾驶的热度已经持续了好几年,有些乐观的公司称今年或者明年就将实现商用。不过关于无人驾驶的真正落地时间的预测,近两年从非常乐观迅速转向谨慎。
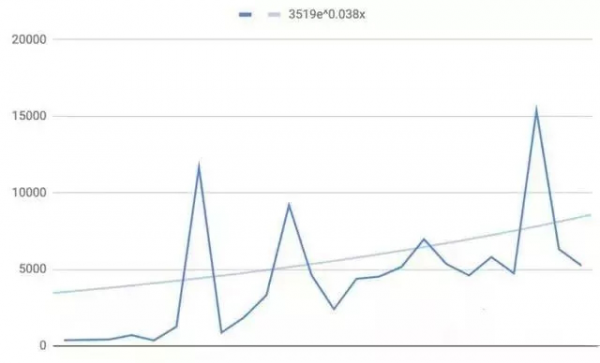
自动驾驶公司Waymo利用技术发展的指数性作为假设,试图找到无人驾驶发展的摩尔定律,进而推导出实现无人驾驶的时间表。
去年Waymo的数据是每次技术失效可行驶11017英里,这大概相当于每失效前可走10的4四次方英里。
从Waymo数据拟合出来的曲线来看,模型大部分情况拟合都比较好,Waymo的MPD与指数拟合的叠加,指数曲线正好对应每16个月性能翻番。
很多无人驾驶的失效只是导致受伤而不是致命的,如果假设无人车失效从来都不会导致致命事故的话,前面的预测就可以减少4年,但仍然需要12年才可以达到人类的表现。
哪怕每16个月表现成倍增长,无人车也要用16年的时间才能赶上人类水平,也就是2035年。那些宣称今年或者明年就能实现无人车的说法看起来就比较可疑了。
被高估的自动驾驶与被低估的算法
围绕边缘的人工智能处理器,公司的首要核心,还是自动驾驶。在攀登这个高峰的过程中,一路都会有收获,包括智慧城市、智慧零售、智能制造,都是边缘处理器的应用场景。
车载端的感知的计算,未来一方面是在路端,通过传感器,边缘计算去感知复杂的车流。同时车端也有边缘计算,去感知周围的情况,这种V2V通讯可以了解到全面的路况动态,从而去达到未来比较高效的交通系统,也许未来的交通路口是这样的。
数据后期的分类标定、数据质量以及算法,存着在很多的不确定因素。而公众和监管机构都坚持,自动驾驶汽车需要测试数亿至数千亿公里,才能验证它们在减少交通事故方面的可靠性,这无疑加大了AI应用在自动驾驶的难度。
由于算力的局限,致使AI训练过程变得很长。数据量超出硬件承载的上限,AI就无法表现得老练得体。也因为同样的原因,人们必须事先筛选数据,避免硬件崩盘。

解决自动驾驶汽车技术中的难题
自动驾驶汽车无疑将开启了交通运输行业的新时代,但整个行业尚需解决一些技术难题,方可真正实现能够商业化的自动驾驶技术,有必要减轻驾驶负担,并使驾驶的过程变得更安全。
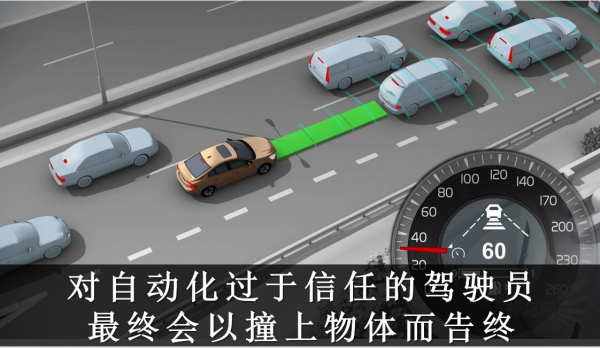
ADAS功能的标配化会使驾驶员在工况超出ADAS处理能力的情况仍然盲目依靠它。例如,自适应巡航控制技术在汽车直接跟随另一辆行驶中的汽车时能够运行良好,但它通常不能发现静止的物体。
不幸的是,现实生活中的情况以及受控实验都表明,对自动化过于信任的驾驶员最终会以撞上静止的汽车或其他物体而告终。ADAS目前可实现的功能有限,而这正是许多早期用户所没有真正领会理解到的。
安全专家担心,半自动驾驶汽车的驾驶员可能会在自动驾驶模式下进行阅读或发短信等活动,从而在被要求接管汽车控制权的瞬间会缺乏对环境必要的感知。
随着驾驶员又再次操控汽车,他们必须立即评估周围环境、确定车辆在其中的位置、分析其所面临的危险状况并选定一个安全的行动方案。
而当车速达到65英里/小时(约合104公里/小时)时,汽车只需不到4秒的时间便可驶过相当于标准足球场长度的距离,且驾驶员将控制权交给汽车的时间越长,再次进入驾车状态的过程也会越长。
因此,汽车制造商必须开发更好的人机界面,以确保新技术将挽救更多的生命而不是引发更多的事故。
安全和便利之间的矛盾
自动驾驶面临安全与便利的双重矛盾。现实中,人们对安全事故的敏感,甚至一度让主机厂乃至科技公司对自动驾驶踌躇不前。
未来的汽车作为软件和数据的载体,数据的类型将会多种多样:地图数据,气象数据,汽车诊断数据,急救信息,定位信息,娱乐互联等等。总之,不管通信如何发展,都是用来服务数据的。
不同的数据对应不同的网络功能,系统性能,安全,用户体验,比如车辆定位和娱乐视频对于智能汽车来说,网络性能的要求肯定是不一样的。自动驾驶数据需要高接入容量,低延迟和高速率,但对气象数据来说,这些也不是最迫切的。
车联网具备了很多的内涵,未来的通信技术带来的大带宽只是显而易见的优点之一,汽车的智能化还任重道远,培育万物互联和低时延的场景需求还要时日。

底层技术不足以支撑重大事件
通常来讲,敢于直接向全自动驾驶发起挑战的,大多拥有很强的技术人才和资金后盾。这也可以理解为,缺乏后盾或者亟待尽快盈利的公司,很自然地会选择从低级别向高级别循序渐进的方式去研发自动驾驶。
自动驾驶场景上的复杂性,决定了深度学习相比于传统机器学习方法有得天独厚的优势,随着车联网的普及和大数据技术的发展,深度学习被行业定义为未来解决自动驾驶落地的关键武器之一。
不过,由于深度学习所依赖的大数据和计算量及其近似黑盒的难解释性,又使得深度学习在自动驾驶实际应用场景中经常处于萌芽的阶段。
现阶段自动驾驶底层的技术,仍不能支撑、解决和处理重大交通问题,很多问题尚未暴露出来,等到大规模商用的时候,可能会暴露出更多无法预料的问题,而这些问题往往决定着行业的生死。

结尾:
目前自动驾驶引发的伦理之争、信息安全、交通事故的权责归属、商业化之路等问题都需要整个行业冷静下来思考。
不过,自动驾驶是汽车工业的梦想,未来一定会实现,至于何时实现没有正确答案。无论它早来还是晚到,整个产业链都需要长期的巨额投入,包含各种技术的融合,以及高精地图、5G通信技术等,还有相关法规和行业标准的建立。
