新年舞蹈背后波士顿动力公司的专利版图
空天防务观察美国当地时间2020年12月30日,波士顿动力公司(Boston Dynamics)发布了一段视频。视频中,该公司研发的Atlas、Spot、Handle三款机器人就着一首1962年的热门歌曲,展现了多样舞姿。
Atlas和Spotmini机器人共舞庆祝2021新年在过往的印象中,双足类人机器人Atlas已经可以做到短跑、体操、跑酷、后空翻等动作,但在最新的视频中,其技能进一步提升,可以模仿当下最热门的舞步:鬼步舞。复古的舞步和精准的踩点,都让Atlas看起来更像一个人类舞者。与之前的视频相比,Atlas机器人展现出的奔跑、跳跃、拖曳和旋转动作更加协调流畅。说明Atlas已经具备了极高的动作协调能力。
回顾波士顿动力公司的发展史,1992 年从麻省理工学院(MIT)脱离出来,早期通过DARPA项目为美军开发四足机器人(BigDog),至2013年12月被谷歌公司全资收购,将其并入到Google X实验室,而谷歌一向对与美国军方的合作持保守态度,从2019年谷歌内部成立先进技术咨询委员会来探讨AI技术伦理问题,并制定禁止使用AI开发武器的内部准则,就可看出其与波士顿动力公司在研发方向上可能存在本质分歧。于是2017年谷歌将波士顿动力卖给软银,在这之后机器狗SpotMini开售,产品开始具备一定的商业前景。
2020年12月11日,软银又以1万亿韩元(约合60.22亿元人民币)的价格,将波士顿动力80%的股份出售给韩国现代汽车。事实上,波士顿动力公司在并入软银后就已经开始走向商业变通,其推出SpotMini就是一个强烈的商业化信号。而除了计划将SpotMini推向更多商用领域,去年该公司还面向仓储物流自动化领域,推出了机械手臂和基于计算机视觉的Pick机器人。
此外,该公司还计划在2021年推出一款用于仓储的移动机器人。这些产品线已经基本覆盖了制造业常用的工业机器人,这也表明,波士顿动力一直在做更多的商业化探索。笔者检索了BOSTON DYNAMICS, INC(Boston Dynamics Inc)的全球相关专利,共得到111件专利族,并扩展得到495件全球相关专利。以上述数据为基础分析了波士顿动力公司在全球的专利布局情况。其中39件专利族是美国政府机构资助项目,占比达到35%,其中由DARPA(美国防部国防高级研究计划局)资助项目33件,US Army(美陆军)资助项目1件,Sandia National Lab(美国能源部桑迪亚国家实验室)1件,US Government(美国政府)直接资助项目4件。
经过分析,其受资助项目主要集中在机器人腿部结构、应对步态干扰、液压阀和限位器、机器人感知自身位置姿态、步态动作的装置方法上。其中,腿部支撑结构相关专利5件,应对步态干扰和负载自适应算法专利8件、液压阀和限位器相关专利9件,机器人位置姿态和动作步态专利17件。机器人位置姿态和动作步态专利在2016年后的新申请专利仅3件,占比偏低。应对步态干扰和负载自适应算法专利中2016年后新申请专利5件(总计8件),腿部支撑结构类相关专利则均为2014年以前相关申请,时间较早。如下图所示。
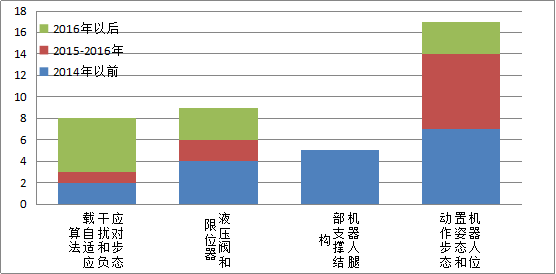
波士顿动力全球专利技术按申请时间分布图(中国航空工业发展研究中心制图)应对步态干扰和负载自适应算法的新专利是使用异步时序处理步态干扰(专利US20200269430A1),其应用领域是解决有腿机器人在面对粗糙或者不平坦地形状态下的腿部摆动状态和踩下状态可能存在的干扰;位置姿态和动作步态方面的新专利主要是自动摇摆高度调节和自动地面距离测量(专利US20200254621A1、US20200241534A1),同样是解决在具有倾斜地面例如岩石地形的环境中或各种其它不平坦景观中,机器人需要知道地面坡度以保持平衡并向前行进的问题,并使用来自包括加速器和/或陀螺仪的惯性测量单元(IMU)等非接触传感器的信息来估测机器人的方位。
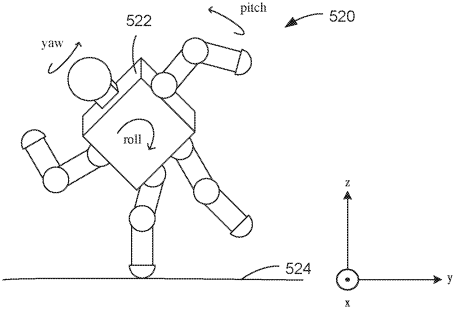
类人机器人自然俯仰和滚动技术示意图(专利US20200254621A1附图)可以看出,2016年后波士顿动力公司接受美国政府机构资助项目主要集中在机器人应对步态干扰和负载自适应相关领域,并且在类人形机器人腿部结构和液压阀方面已形成成熟技术,这些因素使其具备可能的军事价值。虽然该公司三度易主,但专利文件显示,直到2020年其都在承担美国政府资助项目,背后的军事价值不言自明。和政府资助类专利相比,该公司其他专利技术方向则较为分散,与其商业路线规划和被收购经历有较大关联,目前主要涉及仓储类管理、仓储移动机器人和SpotMini机器狗等领域。尤其在2017年后,这类专利集中在仓储类管理和货架机器人领域。
其中值得关注的是,专利US20200290213A1提供了可以减轻机器人附件(例如,脚或其他末端执行器等)的打滑的系统和方法。特别提供了部分基于附件位置和为附件确定的控制系统中的滤波器设置用以向附件施加力的方法,另外还提供了基于一个或多个条件的动态调节滤波器参数,从而以在滑动期间有效地阻止附件运动,动态调节所施加的力的方法;专利US20190283822A1提供了一种机器人系统,可以在操作其末端执行器的同时操作其腿以动态地自我平衡在表面上,当腿接触表面(例如地面)时,腿向表面施加力并经受来自表面的反作用力,机器人可以动态控制腿部,以使反作用力使机器人保持平衡,以支撑末端执行器的操作;在末端执行器的操作过程中,腿部提供的动态平衡构成了整个人体操作,与实际人类的实际运动更为相似。上述专利技术极可能用于展现Altas机器人在最新舞蹈视频中的“新技能”。
此外,波士顿动力公司在中国申请发明专利22篇,均为2015年后的PCT国际申请,无实用新型专利,其中扩展同族个数在11-15件的专利占到了50%。其中以Google公司名义申请7件发明专利,涉及机器人制动装置、传感器技术等,申请时间为2015年到2016年;以Google X项目公司名义申请10件发明专利,主要涉及仓储移动机器人和机器狗相关技术,申请时间从2016年持续到2018年,并均于2020年转让给波士顿动力公司。
经分析研判,该公司在中国围绕有腿机器人(如SpotMini机器狗)已形成5件以上的密集专利布局,以保护该类机器人在整体机构设计、控制系统动力、制动系统装置以及负载过载、动态平衡方面技术。其中专利CN110073579A将高功率马达、位置传感器、扭矩传感器和控制器在1件专利中进行组合保护,事实上保护了该有腿形态机器人目前效率最高的电气布置方式,且对各电气部件可能的连接方式进行大量上位概括,专利价值极高。
截至目前,波士顿动力公司受美国政府资助项目在中国国内专利仅有3件且均为2015年申请的早期专利,鉴于这类项目均具备可能的军事用途,应密切关注其背后的技术借鉴价值。 本篇供稿:知识产权与法律事务所
