高功率激光器如何助推自动驾驶落地?
探索科技TechSugar文︱立厷
图︱罗姆、网络
自动驾驶是引领当代汽车与各种技术深度融合的应用,难度之大可想而知。它犹如一场漫长的马拉松,怎样才能有的放矢,把控自如?从目前自动驾驶落地情况看,不论国内国外,基本上都是低速场景,从低速车开始先易后难,力求尽快实现商用落地。
看看国内的例子,易成智行支持L2-L4的应用平台首先实现的是安全性更高的封闭、半封闭场景无人接驳车落地,以解决短途出行最后一公里问题;毫末智行也是按照“从低速到高速、从载物到载人、从商用到民用”的规律递进式发展。
在这一渐进发展过程中,激光雷达(LiDAR)与其他传感器的融合不可或缺,当然要用到激光二极管(激光器),所以,研发高质量的激光发射元件是半导体厂商责无旁贷的任务。最近,罗姆(ROHM)推出了一款激光雷达用75W高输出功率激光二极管,这是其推进低速场景自动驾驶落地一个具有象征意义的产品。
激光雷达光源详解
关于激光雷达原理和使用的光源,罗姆半导体(北京)有限公司技术中心经理吴波表示,激光雷达原理基于ToF(飞行时间)测距原理,通过测量光从光源发出到从对象物返回过程的飞行时间来反推光源到对象的距离。ToF有很多不同实现方法,包括1D ToF、3D ToF等。3D ToF不仅可以获得对象的距离,还可以获得对象的形状、位置等信息。
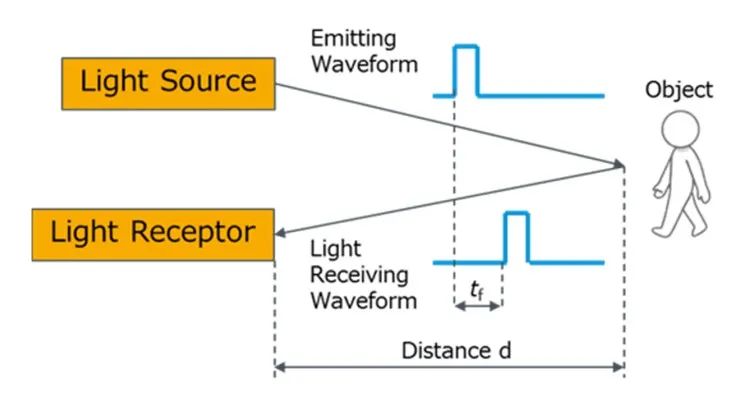
飞行时间法
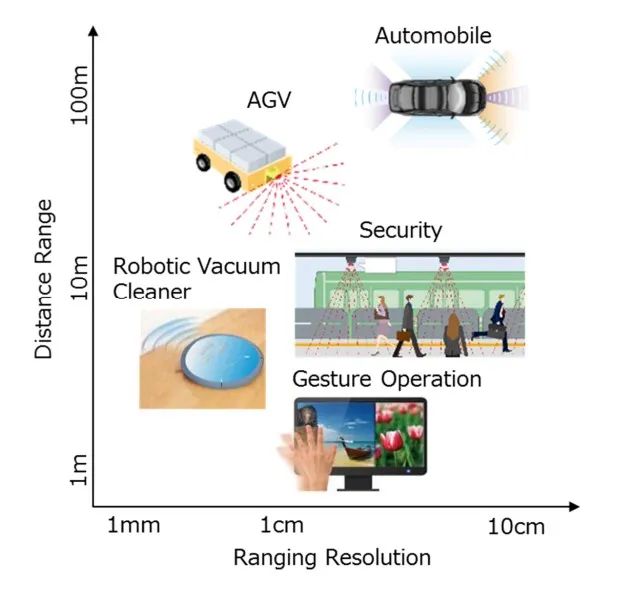
ToF的应用包括短距离人脸识别、手势感应等,中长距离应用有机器人导航、避障,包括自动驾驶的激光雷达等。可以看出,随着测距距离要求越来越远,对光源功率的要求也越来越高。

ToF及其用途
所谓3D ToF是激光器将光打到对象上,用一个感光元件接收对象反射光,再外加一个MCU对发射光和反射光信号进行对比计算,得出光源到对象的距离、形状、位置等各种信息。
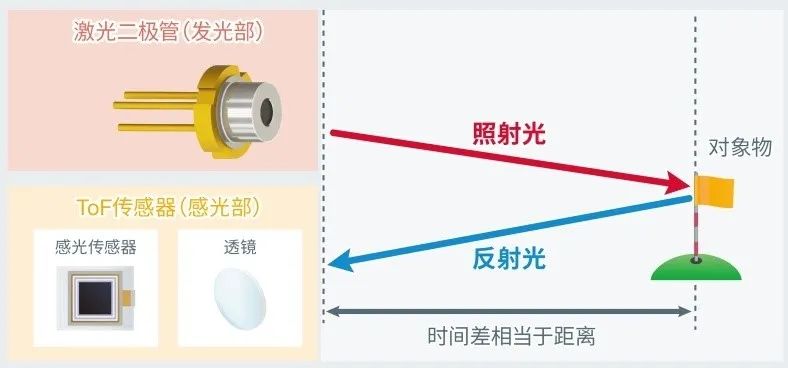
3D ToF激光雷达原理
3D ToF基本有两种实现方式,一种是旋转式,一种是照射式,这两种方式用的光源不太一样。旋转式3D ToF基本用FPLD(法布里-珀罗激光二极管)。其发出的激光经透镜整形后打到多棱镜上,多棱镜360度不停旋转,进行全方位扫描。因为聚光性较好,这种测距方式测距比较远,可以达到100米以上,分辨率取决于机械元件的扫描速度。
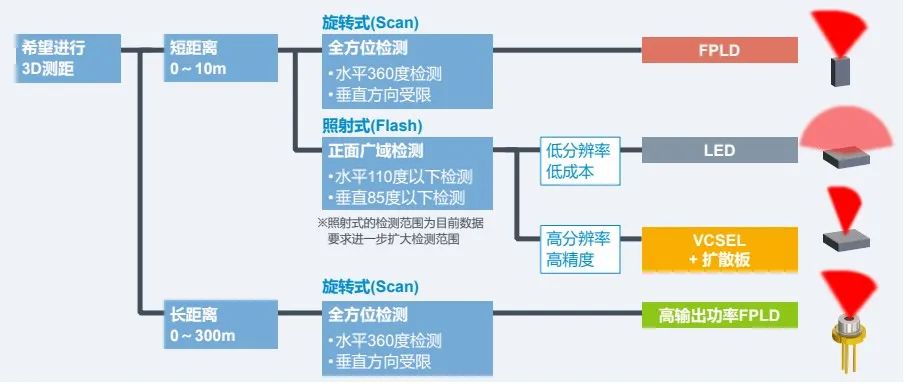
3D测距的激光光源种类
另外一种是照射型3D ToF,用的激光元件叫VCSEL(垂直腔面发射激光器),其中没有机械旋转件,发出的光经一个扩散板扩到120度左右水平角,进行物体扫描。3D ToF分辨率比较好,但是因为光能量比较分散,用来做长距离测距一般比较困难。不管是旋转式还是照射式3D ToF,都可以获得对象的距离、形状、位置信息等,近年来受到了非常广泛的关注。
至于光源,根据不同测距要求,长距离一般使用大功率FPLD激光器;短距离测距有旋转式或照射式不同实现方法。照射式低成本方案采用LED作光源,对于高分辨率、高精度照射式3D ToF一般采用VCSEL+扩散板方案来实现。

实现脉冲发光的驱动方式
那么,FPLD和VCSEL这两种激光器有什么区别呢?最大的区别就是激光传导路径不一样。从FPLD芯片截面图可以看出,上下正负电极通电后从芯片一边发射激光,所以叫边发射型LD。VCSEL同样也有上下正负电极,正负电极通电后垂直于芯片直接从上面发出激光,即垂直腔面发射。不管是FPLD还是VCSEL都是半导体激光器。
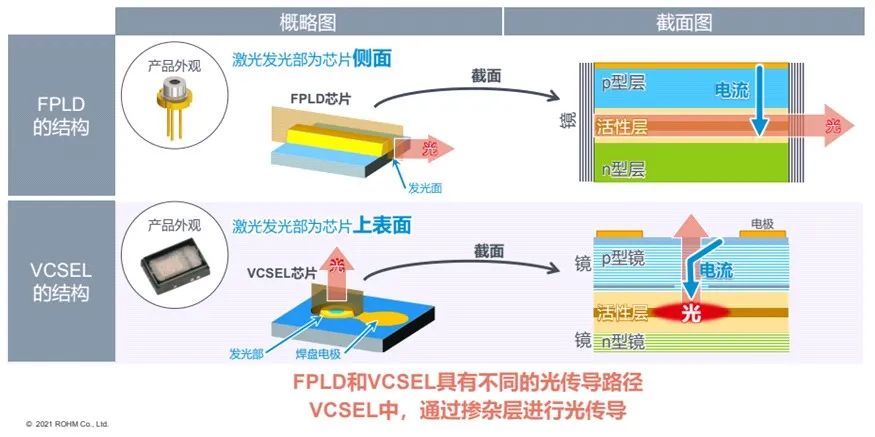
FPLD与VCSEL的区别
半导体激光器生产由来已久
罗姆的半导体激光器生产历史可以追溯到1984年量产780纳米FPLD,不同波长、不同功率的激光器面向不同市场,包括CD、DVD、激光打印机及PM2.5检测等。最近两年,其重点发展的技术主要集中在905纳米大功率激光器,包括新推出的75W大功率产品。
罗姆激光器以往主要集中在635-780纳米波长,输出功率在100毫瓦内。这些小功率激光器有非常高的市场占有率。

罗姆激光二极管输出功率及波长的演变
2019年罗姆开始量产25W 905纳米激光器,未来主要集中在大功率激光器,还有更高功率的阵列激光器。
罗姆的另外一个重点是VCSEL,今年将量产4W以下小功率VCSEL。100W大功率VCSEL正在开发中。
作为IDM厂商,罗姆有自己独有的技术,包括基于MOCVD的晶体生长技术、Wet-Dry蚀刻相结合的精细化加工技术。这些技术有助于罗姆激光器发光光形更好,光电转换率更高;从芯片生产到成品封装也都是内部完成,可以长期供应高品质的激光器产品。
高功率激光器助推低速场景
罗姆发布的75W高输出功率激光二极管RLD90QZW3具有业界超窄线宽的高密度发光,支持长距离和更高精度。这款产品主要是帮助客户加速实现日渐成熟的低速车场景商业模式的落地,同时也为扫地机器人、AGV和自动驾驶汽车等需要自动化工作的广泛应用提供解决方案。
吴波介绍说,RLD90QZW3是一款红外光高输出功率激光二极管,采用CAN56(TO-56)的金属管壳封装,适用于3D ToF系统测距和空间识别激光雷达。利用罗姆自有的元器件开发技术,在业界同等输出功率激光二极管中实现了225?m的超窄线宽专利技术。与线宽290?m的普通产品相比,线宽缩窄了22%,实现了高光束性能。
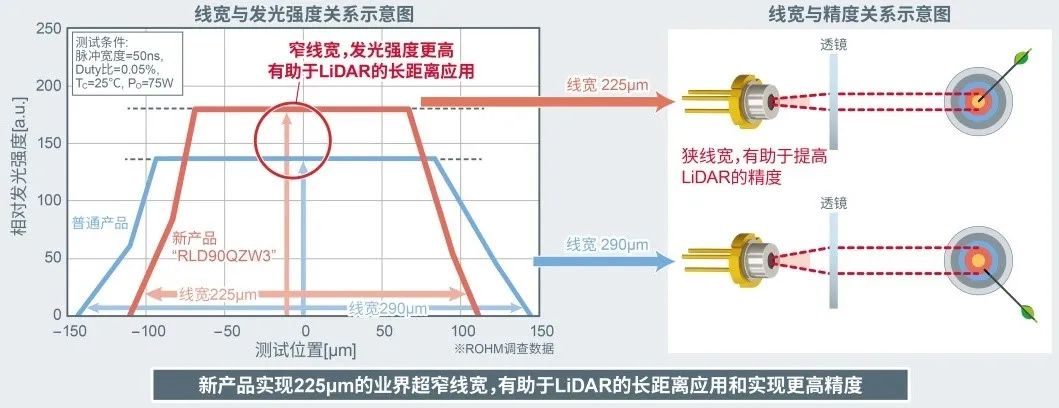
窄线宽可以实现更高精度
激光器发出的光经透镜整形成平行光打出去进行扫描检测,激光器本身的线宽越窄,经过透镜后得到的平行光斑就越小,光斑中心部分光强越强,就可以打得更远,测的精度更高,这一点对激光雷达应用非常重要。
另一个特点是光形特别好。市面上一般激光器普遍存在边缘不清晰的现象。新产品通过各种工艺改良,使中心部分和边缘部分的发光强度一样均匀,没有任何衰减。这对客户实现激光雷达的高精度有一定帮助。
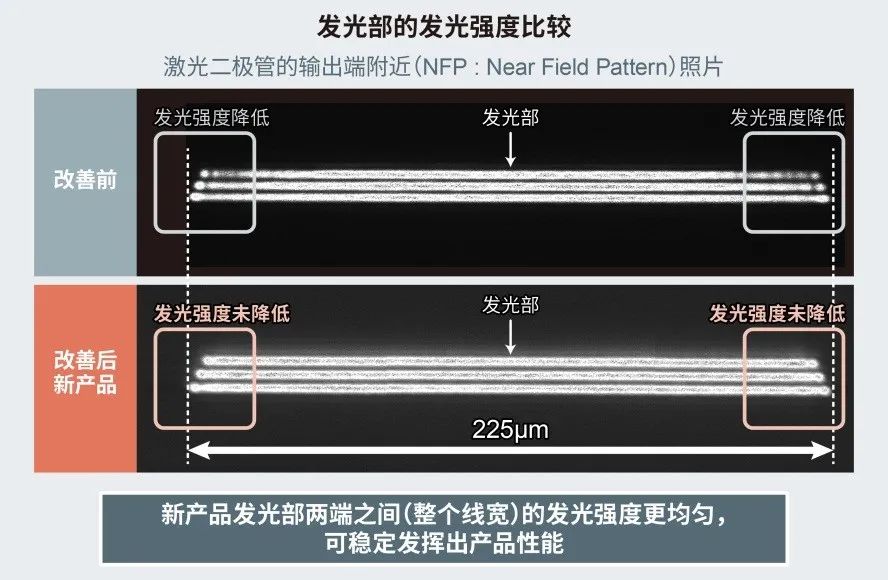
发光强度比较
此外,利用窄线宽与光电转换效率(PCE)此消彼长的关系,新产品实现了与普通产品同等的21%光电转换效率(正向电流24A、75W输出时),因此在使用时无需担心增加功耗。
为了支持客户尽快导入市场,罗姆免费提供评估和所需的丰富设计数据,包括驱动电路设计方法的应用指南、电路板开发用的数据和仿真用的模型(SPICE模型、Ray数据)等。罗姆还和艾睿(ARROW)开发了一个单通道激光测距参考设计测试板。

参考设计测试板
选择激光器因应用而异
为了提高测量距离,需要更高的光输出功率。距离越远,光输出功率的返回率越低。这是由空气中的光衰减引起的,因此,需要更高的光输出功率才能远距离观察物体。为了提高距离分辨率,必须缩短脉冲宽度。当脉冲宽度较长时,探测器接收到的光脉冲往往会重叠,从而难以区分两个或多个彼此接近的物体,所以需要更短的脉冲来提高距离精度。从眼睛安全的角度来看,较短的脉冲也可以增加最大光输出功率。每种应用所需的距离分辨率和距离范围都不同,因此,所需的光输出功率和脉冲宽度都不同,为每个应用选择正确的器件和设计电路非常重要。
飞行时间法的一些用途
据了解,目前罗姆正在开发120W高输出功率和车规级(符合AEC-Q102标准)激光二极管产品。未来,罗姆将继续为包括汽车应用在内的安全、便捷的激光雷达的开发更多产品,为的是满足更多不同的应用要求。
