端到端的自动驾驶系统只能做demo吗?
智车科技IV剑桥大学工程系团队创办的Wayve凭借机器学习算法,只需要使用摄像头和基本的卫星导航就可以实现自动驾驶汽车在陌生的道路上行驶。
自从2016年,英伟达公开了用于自动驾驶汽车的端到端深度学习技术之后,已经有不计其数的公司、单位甚至爱好者用此技术做出自动驾驶的demo。简单网络结构,可以实现摄像头输入到刹车油门方向盘输出的直接映射。然而这种低门槛也注定了它可以解决的问题并不多,很难应对具体驾驶环境上的复杂性。有专家甚至认为端到端不适合开发实用无人驾驶系统,可以做demo,大规模商用可能非常困难。
端到端只配做demo吗?由剑桥大学团队创办的Wayve无人驾驶软件公司却不这么认为。他们没有用高精地图,也没有用激光雷达等昂贵的传感器,当然也没有给汽车手工输入规则,只训练20小时数据,就可以在从未跑过的道路上驾驶。

Wayve 研发团队认为既然是自动驾驶,就不需要手工编码一些规定,要充分的展现其智能的特性。团队采用了当下大热的深度学习强化学习算法,建立了一个可以像人类一样慢慢学习驾驶的自动驾驶系统。
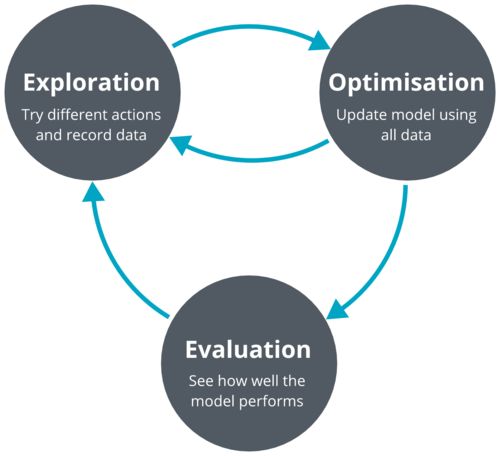
经过探索、优化和评估三个步骤进行迭代,采用深度确定性策略梯度(Deep deterministic policy gradients,DDPG),来解决车道保持问题。
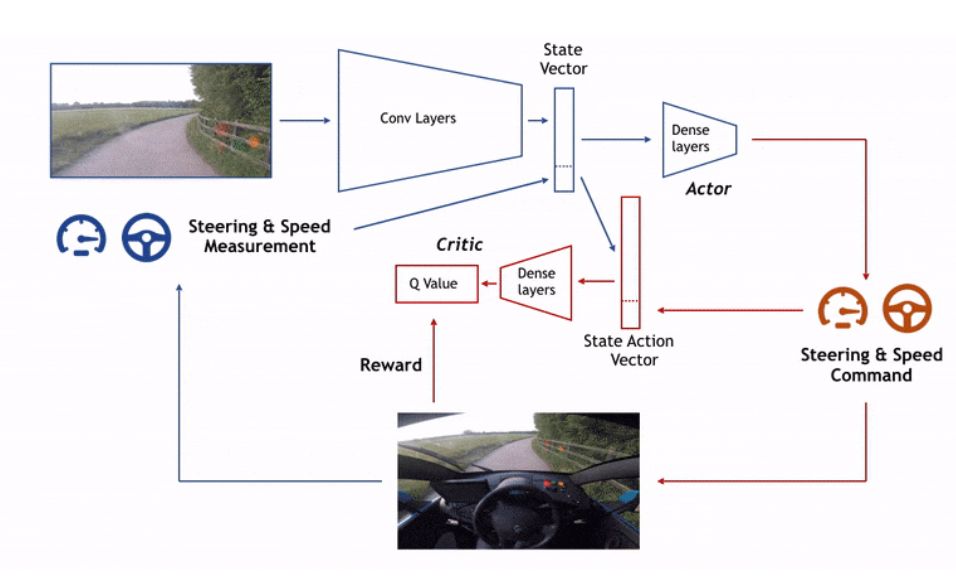
现有技术的图像分类体系结构具有数百万个参数,而Wayve团队的网络构架是一个深度网络,有4个卷积层和3个完全连接层,总共只有不到1万个参数,所有处理都在汽车GPU上执行。
在强化学习仿真测试中,通过随机生成曲线车道,以及道路纹理和车道标记,然后根据收集的数据优化策略,再不断重复。
1 2 下一页>
