深度学习可以解决自我驾驶问题吗?
智车科技IV到目前为止,自动驾驶汽车中使用的LiDAR的成本要高于某些低档汽车本身。激光雷达的维护和处理输出仍然是一项昂贵的工作,令人头疼。因此,这使得它们成为自动驾驶汽车的商业化生产的较不适合的选择。
激光雷达在计算“深度”信息方面非常准确,深度信息是无人驾驶汽车执行路径规划,与物体保持安全距离等操作的最重要内容之一。这使LiDARs成为集成到自动驾驶汽车中的理想选择。但是问题是,它们太贵了!

此前,高射程激光雷达的成本约为75,000美元。但是,为降低激光雷达的成本一直在进行昂贵的研究。Alphabet公司的母公司Waymo通过广泛的研究将成本降低了90%!
到目前为止,自动驾驶汽车中使用的LiDAR的成本要高于某些低档汽车本身。激光雷达的维护和处理输出仍然是一项昂贵的工作,令人头疼。因此,这使得它们成为自动驾驶汽车的商业化生产的较不适合的选择。
其次,LiDAR在恶劣的天气条件下不能很好地工作,它们会产生噪点,这可能会使LiDAR点云的输出不准确。
尽管如此,公司仍应该投资使用LiDAR和点云处理进行自动驾驶的方法,因为谁知道,也许有一天LiDAR也会变得便宜吗?
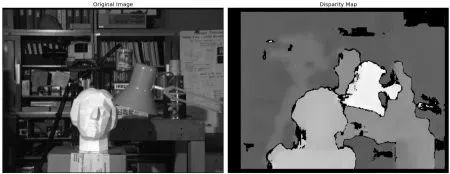
相机非常适合捕捉场景的高分辨率细节。但是问题是,它们没有像LiDAR那样为我们提供“深度信息” :(折衷方案在世界上到处都是。相机的输出是高分辨率,但是是2D平面图像。这几乎是不可能的。可以从单个图像中获取“深度信息”,有些方法可以使用立体视觉从图像中获取深度。
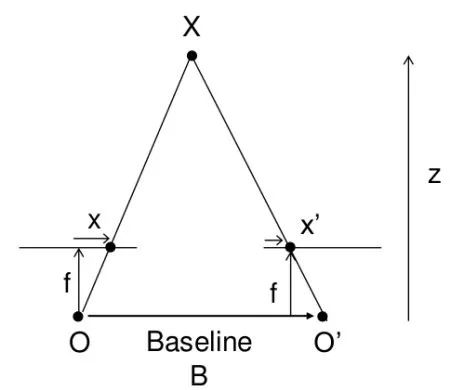
给定从放置在同一水平高度一定距离的两个摄像机捕获的两个图像,我们可以使用计算机视觉算法估计深度信息。
1 2 下一页>
