自动驾驶语义高精地图的层级实现
智车科技IV语义高精地图是高层级的高精地图,语义地图的实现需要以几何地图为基础。在这篇文章中,将要讲述自动驾驶语义高精地图的实现过程。
正如人类驾驶员出行需要导航地图并观察周围环境来确定行驶路线一样,自动驾驶汽车上路时除了依靠自带的传感器探路避障,还需要一份地图来确定自己的位置,进行路线规划,这种供自动驾驶汽车使用的地图就是高精地图。自动驾驶车辆依靠自身配备的传感器探测车身周围环境信息,但超过车身一定距离后,例如车辆前方500米的道路环境,仅依靠车身传感装置很难得到信息反馈,而高精地图能够提供超视距信息,弥补传感器探测的不足。这些全面精确的信息能够为车辆增速还是减速、直行还是转弯等行为提供必要的决策依据。
在真正上路行驶的过程中,随着更高级别自动驾驶的出现以及更高安全要求的提出,仅仅包含了几何位置信息的高精地图已经不能满足市场的需要,现在自动驾驶要做的不仅是对环境的物理性描绘,更要对环境进行理解,而对环境的理解分成两部分:最基础的是几何描绘,例如车辆前方是弯道、直道还是十字路口,距离车辆多远等空间信息。几何地图帮助车辆进行自身定位,并准确识别车辆自身处于地图中的何种位置。第二是语义理解,即通过几何描绘出的这个图形是信号灯还是路标等。语义地图帮助车辆保持在某一正常车道内运行,让自动驾驶车辆了解不同类型的道路之间、道路与路灯和行人之间是怎样的关系,并按照社会公序良俗和具体环境中他人的期望来选择如何作为。语义高精地图是高层级的高精地图,语义地图的实现需要以几何地图为基础,在这篇文章中,将要按顺序讲述自动驾驶语义高精地图的层级实现过程。
道路网络图
语义高精地图的最基础层是道路网络图。道路网络图能够表示存在多少车道、它们行驶的方向以及连接到哪条道路,还能显示人行道和车道之间的优先关系,这使得自动驾驶车辆能够安全地停在十字路口或人行横道上从而实现交叉通行。这些都是可以通过其他层进行变化的复杂属性:交通灯的变化影响车辆需要向哪些车道让路,或者依据时间段改变单双向车道。道路图层与车载导航地图相似,只不过功能更加丰富。自动驾驶汽车的规划功能使用道路网络图来确定从A到B的粗略路径,并通过避免复杂的交叉路口或限速道路来帮助自动驾驶车辆降低风险。

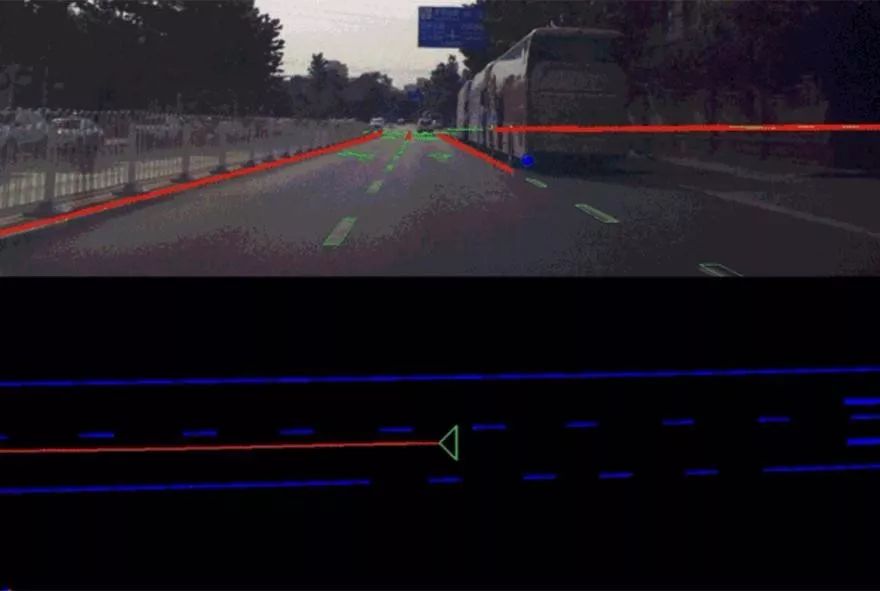
车道几何层
道路图层的基础上是精确到厘米级的车道几何图层。这一图层形状上是一组多边形,表示路面上的车道标记以及车辆将遵守的街道规则。这一图层显示的数据还包含在导航地图中通常没有的属性:线条颜色、允许换道区域、减速带和停止线等。了解这些属性能帮助车联对其他车辆或者行人做出明智的决定,使车辆能够安全地执行一些复杂的操作。虽然道路图层能够实现高水平的规划决策(例如规划从旧金山到西雅图的路线图),但车道几何图层能够帮助实现更具体和详细的路径规划:如何转动方向盘并使用踏板穿过这个十字路口?是否存在例如单行道类的环境限制?
在车道几何图层的辅助下,当自动驾驶汽车真正行驶在路上时,可能会出现改变初始路线的实时决策。车辆的行为规划器使用虚线白色的车道分隔器来决定何时将控制命令发送到车辆的油门和转向控制,从而安全地改变车道或与车流合并。感知系统检测其他交通参与者并对其进行分类(例如,我旁边有一个大型物体,我认为它是卡车)。然后,车辆的智能预测功能使用地图位置、速度等信息来预测卡车在接下来的几毫秒和接下来的10-30秒内将做什么。有了人行道和人行横道的几何形状,自动驾驶车辆可以正确地识别行人,预测他们的行为。然后自动驾驶车辆会在人行横道前减速让行。以上这些系统在短时间内能够多次协同工作,以确保安全舒适的乘坐体验。
1 2 下一页>
