四肢瘫痪患者成功用“大脑意念”操控双机械臂吃蛋糕
学术头条如果说,马斯克的脑机接口公司 Neuralink 在猪脑中植入芯片,可以读取猪活动时的大脑信号波动已让你震惊不已,那现在是时候刷新下认知了。
来自约翰斯·霍普金斯大学医学院(JHM)和该校应用物理实验室(APL)的研究人员已把更强力的脑机接口技术用在了人身上。
不仅如此,在最近的演示中,他们使四肢瘫痪的残疾人能够用自己的“大脑意念”同时控制两支机械臂,拿起餐刀、餐叉切下一块蛋糕,然后把蛋糕送到自己的口中。
这套结合了人工智能、机器人技术和脑机接口的闭环系统,外观看上去其实有点让人发怵,毕竟脑袋上顶着好几个机器接口还是挺吓人,但实验效果却不错,请看下图:
约翰斯·霍普金斯大学医学院的物理医学与康复主任、医学博士帕布罗·塞尔尼克(Pablo Celnik)表示:“业界内类似的脑机接口研究,此前主要集中在一只机械臂上,只从大脑的一侧采集信号进行控制。”
因此,能够同时控制两个机械臂执行日常生活基本活动,再通过植入大脑的电极从大脑两侧检测信号输出,完成切割糕点并将其送到嘴里的操作,是一次前所未有的进展,这意味着脑机接口可以实现更复杂的任务控制。
“同时控制两个肢体的脑机接口系统是一个特别的挑战,因为它并不是简单的 1+1=2 的过程, 更像是试图计算从大脑信号输出,到双臂操作流程的综合信息。” 研究组成员加布里埃拉·坎塔雷罗(Gabriela Cantarero)说。
10 小时开颅手术,在脑壳中植入6个电极
参与该实验的主角名叫罗伯特·布兹·克米勒维斯基(Robert Buz Chmielewski),曾经也是一名爱运动的翩翩少年,不幸的是,在十几岁时因一次冲浪事故致残。
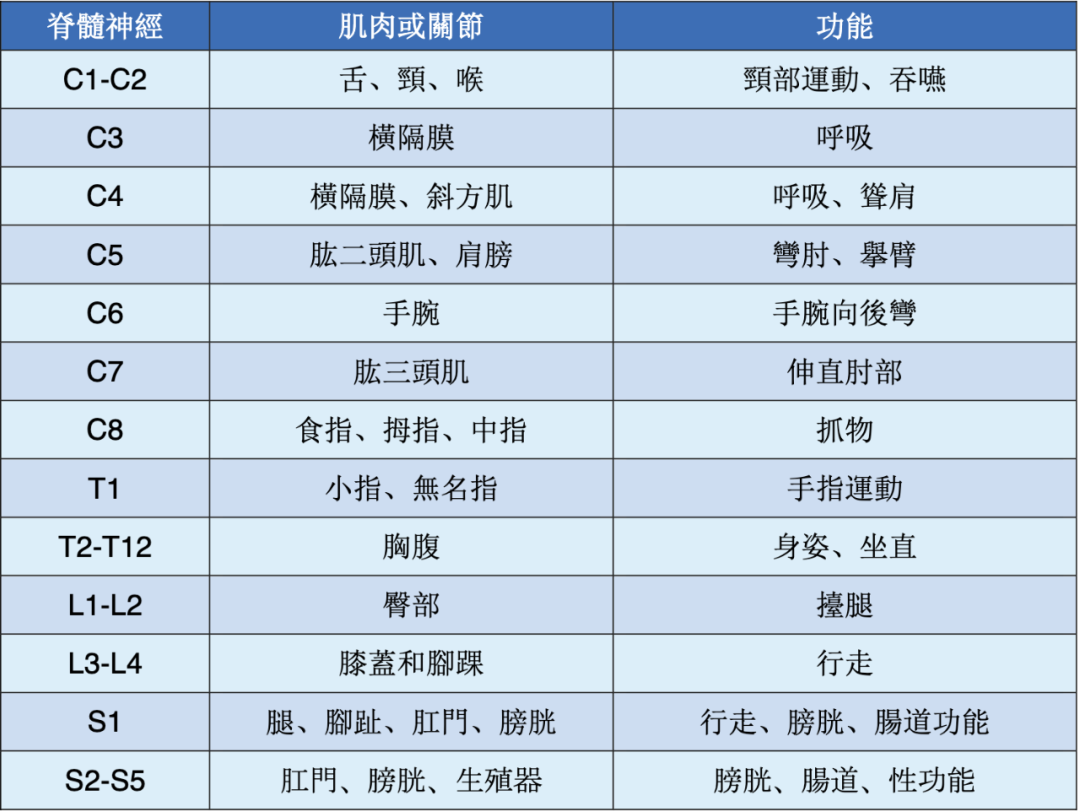
经医学鉴定,这是 C6 脊髓损伤,不同程度的脊髓损伤会影响人的手、手臂和腿的运动,严重点也会影响肠、膀胱和其他器官功能,其中 C1 至 T1 均可导致不同程度的四肢瘫痪,对于克米勒维斯基来说,C6 脊髓损伤让他从肩膀以下瘫痪,肩膀和手腕仅剩一点微弱功能,此后 30 多年生活难以自理。
大约两年前,克米勒维斯基接受了霍普金斯大学团队的邀请,参与到一项实验。
这是一项由美国国防高级研究计划局(DARPA)牵头,利用约翰斯·霍普金斯大学应用物理实验室开发的先进假肢进行的临床试验,名为革命性假肢“RP计划”,他们的目标有两个:第一,允许参与者控制辅助设备;第二,使其能够使用来自大脑的神经信号来感知接触肢体的物理刺激。
这个计划也催生了模块化假肢(MPL)项目,这些假肢集成了例如力感知、加速度、滑移和压力的指尖传感器等。
2019年1月,克米勒维斯基接受了长达 10 小时的脑部手术,外科医生打开他的头骨,在他的大脑两侧植入了 6 个电极阵列(MEA),一半布置在运动皮层,一半在感觉皮层,它们的大小分别跟蚂蚁的大小差不多,并能通过细电线将它们连接到一个复杂的计算机系统来完成脑信号的采集和计算。
作为手术的一部分,研究小组还率先提出了一种方法,该方法可通过手术过程中大脑活动的实时映射,来确定放置电极的最佳位置。
这些电极阵列被设计用来读取运动信号和刺激感觉信号,可以绕过受损的脊髓神经影响,通过电线连接到机器手臂或其他效应器,如光标屏幕、虚拟效应器等,从而允许大脑的神经信号向其他设备发送信息,反之亦然,也能记录、发送电脉冲并“刺激”负责运动控制和触觉的大脑区域。
这些电极可以在大脑中植入多达五年,而对脑部或皮肤形成疤痕的风险最小。但是,像任何手术一样,存在感染或出血的风险。
吃蛋糕之前,训练了9个月
刚接好的脑机接口系统,并不能很快就可以进行双机械臂操作,做完手术后的克米勒维斯基在随后的几个月内,开始通过 APL 开发的脑机界面,学习同时控制两个假肢的方法。
另一方面,研究人员对他的进步印象深刻,并希望进一步推动相关工作,所以利用 APL 的内部研究资助,发起了一条平行的课题称为“智能假肢”,以配合脑机接口开发策略,利用神经刺激,同时提供先进的双机械臂控制和感觉反馈。
在过去的 9 个月里,研究人员测试了克米勒维斯基在使用和不使用计算机模型的情况下,在同一时间、同一方向,以及相反方向进行一系列越来越复杂的伸展运动的能力,他们使用虚拟现实中的假肢以及一个真正的电动假肢来跟踪患者到达计算机化目标的准确性。
科学家们还进行了刺激大脑的测试,并确定了病人在哪里可以“感受”到假肢上的传感器所触发的感觉,实验报告称,病人能够以 100% 的准确率区分所有连接了传感器的手指的感觉。
通过这些测试和成功的手术,研究小组在脑机接口领域取得了多个“第一”。
“我们团队第一次展示了一个四肢瘫痪病人同时‘感觉’大脑刺激传递到大脑两侧的能力。”该项目的技术负责人之一、APL 的马修·菲弗(Matthew Fifer)博士解释说,“同时,我们展示了如何通过对 MPL 手指的物理触摸,成功控制对大脑中左右手指区域的刺激。”
最终,世界上第一个双边脑机接口植入实验,帮助克米勒维斯基实现了需要双机械臂的运动,并能感知与环境的交互,就像它们是他真实的手臂一样。
one more thing
通过脑机接口控制双机械臂固然取得了不错的成果,但是霍普金斯大学团队其实还有一项令人称奇的假肢风格,叫做“靶向肌肉再神经化”治疗,该实验曾在一名因电力事故失去双臂的患者身上进行。
顾名思义,就是直接从肢体神经的角度切入,给患者带上装备后,研究小组使用模式识别软件分离出各个收缩肌的信号,研究它们之间的交流,以及神经脉冲的频率和幅度,这些信息随后被转化为假肢的特定运动,例如反转手腕,伸胳膊抓取杯子或其他组合动作。
与脑机接口相比,这种方式不需要往脑袋中植入电极传感器,也无需动手术,风险可大幅降低,不过缺点是,肌肉神经可能没有脑神经那么敏锐。
在不少科幻电影中,“人机合一”是一种向往,人类憧憬随着未来科技进步,可以实现一定程度的永生,只要大脑不死或者意识存在,就能重新塑造出由智能机械和新材料组成的全新躯体,并实现超越普通人体的增强机能。
尽管科幻距离现实依旧遥远,但科学家们却正在一步步向目标靠近。

