一文教你如何在x86平台用Qemu来模拟ARM系统
道哥分享前言
为什么需要ARM模拟系统
Qemu是什么?
Qemu的两种模式
Qemu 能做什么?或者说适合做什么?
在 Ubuntu16.04 系统中,利用 Qemu 搭建一个ARM虚拟机
测试HelloWorld应用程序
总结
软件下载地址
前言
前一段时间因为工作需要,我对ARM模拟器进行了一番调研。调研目的是:由于项目参与人员比较多,如果人手一块ARM开发板,资源比较紧张,希望能够用模拟器来代替。
在调研期间,花费了很多时间去查资料、测试验证。在实际验证的时候,发现一个现象:很多文章虽然给出了或简单、或详细的操作步骤,但是大部分都没有写清楚操作的背景、各个软件的版本,这就导致需要把整个文章看完了、把所有的操作步骤都做了一遍,才明白作者想表达的是什么意思,操作的目的是什么。
我觉得,任何一篇文章,首先要让读者知道为什么要读这篇文章,或者说读了这篇文章能够有什么收获。
如果是操作性比较强的文章,那么就有必要交代清楚工作平台的背景是什么,要达到的目的是什么,总体步骤是怎么样的。只有这样,阅读文章的人在心中首先建立一个宏观的框架,在理解框架的基础上,再去实际操作,这样的话就更容易理解。
当然了,每个人的学习和阅读习惯都不一样,上面只是我个人的感受,或者说我喜欢这样比较有条理的文章,这样才不至于迷茫。
回到Qemu的主题上来,这篇文章主要是把调研的结果进行梳理、汇总,包括如下内容:
为什么需要ARM模拟系统?
Qemu是什么?
Qemu 能做什么?或者说适合做什么?
在 Ubuntu16.04 系统中,利用 Qemu 搭建一个ARM虚拟机操作步骤是什么?
编写一个HelloWorld程序,放到虚拟机中执行。
为什么需要ARM模拟系统
ARM平台的软件开发工作,可以划分为2类:
应用程序的开发
系统开发(内核、文件系统、驱动程序)
应用程序的开发
我们在开发嵌入式项目的时候,一般都是先在x86平台上把大部分的功能开发完成,然后再交叉编译,得到在ARM平台的可执行程序或者库文件。再通过scp指令或者NFS远程挂载的方式,把这些文件复制到ARM板子上之后执行。
一般而言,应用程序就是利用硬件产品的各种资源、外设,来完成特定的功能,比如:数据采集、控制外部设备、网络传输等等。主要的特征就是与外部的各种设备进行交互。
系统开发(BSP)
系统开发的最终目的是:为应用程序的执行准备一个基本的执行环境,内容包括:系统引导程序bootloader,内核kernel,文件系统rootfs,系统中所有设备的驱动程序。在实际的项目开发中,系统开发难度更大一些,一旦开发完成,对于一块板子来说基本上不会轻易变动,代码的使用生命周期更长。
以上这两种分类,主要是从开发工作的内容角度来进行划分的。可以看出:
应用程序开发:灵活性更大、需求变动会更多(产品经理或项目经理经常给你改需求)。
系统软件开发:需求更稳定、很多代码都是官方提供或者开源的,工作内容就是进行定制、裁剪。
对于系统软件开发来说,如果每次编译出一个bootloader、或者kernel,都上一个ARM开发板进行验证,的确比较麻烦。如果能有一个ARM模拟系统,直接在x86上进行模拟,工作效率就会提高很多。
Qemu是什么?
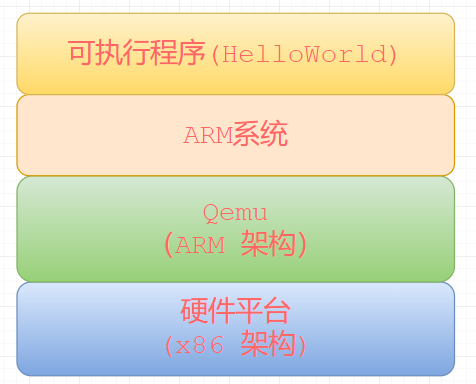
Qemu是一个开源的托管虚拟机,通过纯软件来实现虚拟化模拟器,几乎可以模拟任何硬件设备。比如:Qemu可以模拟出一个ARM系统中的:CPU、内存、IO设备等,然后在这个模拟层之上,可以跑一台ARM虚拟机,这个ARM虚拟机认为自己在和硬件进行打交道,但实际上这些硬件都是Qemu模拟出来的。

正因为Qemu是纯软件实现的,所有的指令都要经过它的转换,所以性能非常低。所以在生产环境中,大多数的做法都是配合KVM来完成虚拟化工作,因为KVM是硬件辅助的虚拟化技术,主要负责比较繁琐的CPU和内存虚拟化,而Qemu则负责I/O虚拟化,两者合作各自发挥自身的优势,相得益彰。这部分不是重点,就不具体深入介绍了。
Qemu的两种模式
Qemu有两种执行模式:
用户模式(User mode):利用动态代码翻译机制来执行不同主机架构的代码,例如:在x86平台上模拟执行ARM代码,也就是说:我们写一条ARM指令,传入整个模拟器中,模拟器会把整个指令翻译成x86平台的指令,然后在x86的CPU中执行。

系统模式(System mode):模拟整个电脑系统,利用其它VMM(Xen, KVM)来使用硬件提供的虚拟化支持,创建接近于主机性能的全功能虚拟机。
Qemu 能做什么?或者说适合做什么?
因为Qemu是使用纯软件模拟的,它的强项是模拟那些不涉及到外部的具体硬件设备的场景,比如:
想学习如何定制bootloader;
想在Arm系统中进行文件系统的裁剪,学习文件系统的挂载过程;
想体验一下如何配置、裁剪linux kernel;想学习Linux系统中的设备树;
...
以上这些场景中,都非常适合使用Qemu来模拟ARM系统。
在 Ubuntu16.04 系统中,利用 Qemu 搭建一个ARM虚拟机 使用Qemu虚拟机的几种选择
利用Qemu来运行ARM虚拟机,你有2个选择:
简单方式:直接下载别人编译好的映像文件(包含了内核,根文件系统),直接执行即可。
缺点是:别人编译好的也许不适合你的需求,没法定制。复杂方式:自己下载内核代码、根文件系统代码(例如:busybox),然后进行编译。
优点是:可以按照自己的实际需求,对内核、根文件系统机型裁剪。
在第2种复杂模式中,又可以有2个选择:
2-1. 内核代码、根文件系统代码全部自己手动编译,最后把这些编译结果手动组织在一个文件夹中,形成自己的根目录;
2-2. 利用 buildroot 整个框架,只需要手动进行配置(比如:交叉编译器在本机上的位置、输出路径、系统的裁剪),然后就可以一键编译出一个完整的系统,可以直接烧写到机器!
以上这几种操作方式的选择,可以根据自己的实际需要来选择。如果对构建系统的整个流程已经非常熟悉了,就利用buildroot工具;如果是想更彻底的学习制作一个系统,那就手动一步一步的实际编译、操作一遍,多练几次,你就变成大牛了。
下面,我们就按照2-2的方式,进行实际操作一遍。所有的指令部分,我都直接贴代码,不用截图,这样方便复制。
测试平台
我的工作电脑是Win10,通过VirtualBox安装了Ubuntu16.04虚拟机,64位系统。
下面的操作在Ubuntu16.04虚拟机中可以顺利编译,当然,一些基本的工具(例如:build-essential, make等基础工具软件这里就不详述了)。
安装交叉编译器
交叉编译器的作用就不需要详细解释了,因为我们是在x86平台上进行编译,而运行的平台是ARM系统,这2个平台的指令集不一样,所以需要交叉编译得到ARM系统上可以执行的程序。
sudo apt-get install gcc-arm-linux-gnueabi
验证安装结果
dpkg -l gcc-arm-linux-gnueabi
显示如下:

有些文章建议自己下载交叉编译器,然后手动设置环境变量。我实际操作了一下,手动下载的交叉编译工具链在编译内核的时候报错,所以还是建议直接用apt-get直接安装。
编译内核kernel
内核kernel的作用也是不言而喻的,就相当于我们的Windows操作系统,没有这个操作系统,硬件就是一堆废铁。当系统启动的时候,会把内核加载到内存中,然后从内核的入口地址开始执行。
下载内核版本:linux-4.14.212.tar。在文末,我会列出所有的软件包下载地址。
使用现成的vexpress开发板子的config文件
make CROSS_COMPILE=arm-linux-gnueabi- ARCH=arm vexpress_defconfig
这个操作,会把vexpress_defconfig作为配置文件保存为.config,下面在编译内核时就根据这个config中的配置进行编译。
如果需要对内核进行裁剪,执行:
make menuconfig
根据自己的实际需要,对内核进行定制。比如:可以配置网络和NFS,在系统启动的时候就自动挂载宿主机中的某个目录。
编译内核make CROSS_COMPILE=arm-linux-gnueabi- ARCH=arm
编译得到内核文件arch/arm/boot/zImage,Qemu启动时需要指定使用这个映像文件。
制作根文件系统
内核在启动之后、执行到最后步骤时,需要挂载根文件系统,然后执行文件系统中指定的执行程序,例如:/etc/rc.local。
如果没有跟文件系统,那么内核在执行到最后就提示:panic...。
下载busybox
版本:busybox-1.20.2.tar.bz2。
创建rootfs根目录
mkdir -p rootfs/{dev,etc/init.d,lib}
把busybox-1.20.2中的文件复制到rootfs根目录下,主要是一些基本的命令cp busybox-1.20.2/_install -r rootfs/
把交叉编译工具链中的库文件复制到rootfs根目录的lib文件夹下sudo cp -P /usr/arm-linux-gnueabi/lib rootfs/lib/
制作根文件系统镜像根文件系统镜像就相当于一个硬盘,就是把上面rootfs根目录中的所有文件复制到这个硬盘中。
(1) 生成512M大小的磁盘镜像
qemu-img create -f raw disk.img 512M
(2) 把磁盘镜像格式化成ext4文件系统
mkfs -t ext4 ./disk.img
(3) 将rootfs根目录中的所有文件复制到磁盘镜像中操作步骤是:创建挂载点-挂载-复制文件-卸载。
mkdir tmpfs sudo mount -o loop ./disk.img tmpfs/ sudo cp -r rootfs tmpfs/sudo umount tmpfs
(4) 使用file指令检查一下
file disk.img

利用Qemu启动ARM虚拟机
1.启动虚拟机
这个命令有点长,测试时建议直接复制、粘贴。
qemu-system-arm -M vexpress-a9 -m 512M -kernel ./linux-4.14.212/arch/arm/boot/zImage -dtb ./linux-4.14.212/arch/arm/boot/dts/vexpress-v2p-ca9.dtb -nographic -append "root=/dev/mmcblk0 rw console=ttyAMA0" -sd disk.img
2.停止虚拟机在Ubuntu另一个终端窗口中,通过killall指令来停止。
killall qemu-system-arm
当然,也可以用ps指令找到qemu-system-arm的进程号,然后通过kill -9来停止虚拟机。
测试HelloWorld应用程序 在Ubuntu任意一个目录,编写HelloWorld可执行程序hello.c:#include <stdio.h> int main() { printf("HelloWorld! "); return 0; }
交叉编译hello.c,得到可执行程序hello:arm-linux-gnueabi-gcc hello.c -o hello
通过file指令,查看一下hello程序:
file hello

通过kill命令停止虚拟机。
把hello可执行程序复制到磁盘镜像disk.img中操作步骤是:挂载-复制文件-卸载。
sudo mount -o loop ./disk.img tmpfs/ cp hello tmpfs/ sudo umount tmpfs
执行hello程序再次启动虚拟机,此时可以在根目录下面看到hello文件,直接执行即可看到输出结果。总结
在以上的操作步骤中,我们把一个ARM系统在启动应用程序之前,所需要的程序都手动编译、操作了一遍。看一遍很容易就明白,亲手操作一遍印象会更深刻。
这里的操作过程有些还需要继续深入,比如:在系统启动之后,自动挂载宿主机(Ubuntu系统)中的某个文件夹,这样就可以把hello等可执行程序复制到挂载目录中,然后在ARM系统中直接执行了,而不用再执行下面在一连串的操作(停止虚拟机-挂载磁盘镜像-复制文件-卸载-启动虚拟机)。
最后,希望这篇总结能给你带来小小的收获和提升!
